OSD overlayv0.1.0 准备中Apache 2.0C++17 运行时Sophon BM1688 NPU16 路 CV 验证
现场 AI 基础设施
不只是算法,是可复用的 AI 交付底座。
视频 AI 项目真正进入现场时,还要处理视频接入、模型运行、规则判断、告警截图和系统集成。
RTSPIPCNVR
CosmoEdge边缘运行时
模型推理
规则编排
系统输出
rule eventevidence frame{ api: true }完整了解引擎工作流。
从任务创建、实时预览到下游输出,视频展示引擎如何在同一套控制台中运行。
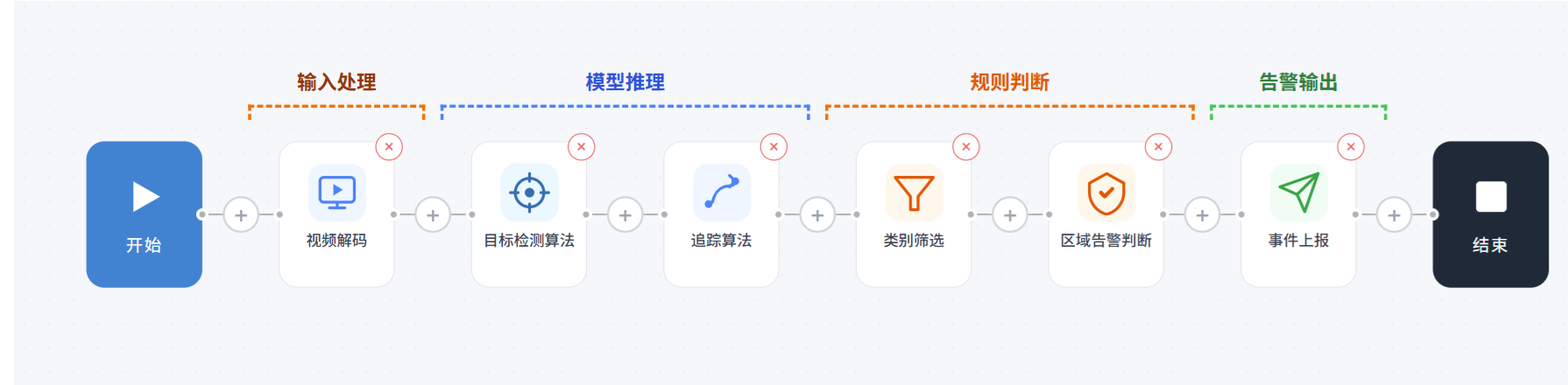
可视化管线
把视频接入、模型推理、规则判断和结果上报串成任务。
提示词驱动
通过 GroundingDINO 和 VLM 把开放词汇检测与视觉状态判断带到边缘侧。
可配置应用,而不是一次性开发项目。
视频接入、模型推理、场景任务、告警、展示和输出都被模块化,方便项目交付、现场调整和后续复制。
IN不重搭系统,也能构建 AI 应用输入源、模型、规则、叠图和交付输出可以在同一套工作流中配置完成。
TPL把试点经验沉淀成模板一个场景跑通后,规则、参数和输出方式可以继续复制到更多点位。
ITR把现场反馈变成持续迭代通过告警复核和任务配置,逐步优化识别效果、通知策略和运行规则。
先描述任务,
再决定是否训练新模型。
内置多模态能力让团队先用提示词验证长尾场景,再决定是否进入采样、标注和训练周期。
01先描述目标DINO 开放词汇检测先验证异物、杂物、临时施工物等长尾目标是否值得投入。
02再判断视觉状态VLM 用自然语言理解消防设施、门窗状态、人员行为和环境变化。
03最后输出业务事件规则、区域、截图和 MQTT / Webhook 输出让提示词结果可复核、可上报。

不是演示脚本,而是面向长期运行的边缘系统。
CosmoEdge 提供运行任务、资源状态、告警记录、模型资源和下游系统对接能力,帮助项目团队把算法能力纳入真实业务流程。
多路视频任务运行总览模型资源告警记录MQTT / Webhook边缘设备


快速开始
先在 x86 上开发验证,准备好后再部署到边缘设备。
把 x86 开发模式作为最短验证路径,完整命令、截图和检查点进入快速上手教程阅读。
验证路径
先跑通 x86,再进入完整教程。
从本地运行栈开始,确认控制台、实时预览和 MQTT / Webhook 输出,再把同一套流程迁移到 Sophon BM1688 部署。
分层解耦架构。
用分层解耦把工程链路拆清楚:视频接入、推理、规则与交付各自可替换、可演进。
CosmoEdge 边缘智能中枢
可交付可复制可持续迭代
CosmoEdge Ready Device
硬件、模型和交付支持,一套起步。
开源仓库提供引擎、Web 控制台和任务流程。
认证设备包额外提供预配置 Sophon BM1688 NPU 加速、生产模型、场景预设和现场部署支持,覆盖人体检测、车辆分析、安全帽识别、烟火识别、区域入侵、越线统计和集成试点等常见任务。
完整硬件规格和认证配置会随 v0.1.0 公开版本一起交付。


面向需要把视觉 AI 落到现场的项目团队。
用一套可复用的交付底座,覆盖安全、巡检、交通、园区等常见场景,从试点到规模复制更顺。
安全监测
把安全帽、区域入侵、烟火和越界检测沉淀成可复核的现场事件。
Camera -> YOLO -> Rule -> MQTT交通与人流分析
用多路 RTSP、跟踪器和越线规则统计人流、车辆与区域占用。
RTSP -> Tracker -> Line Rule -> Count视觉巡检
用 DINO / VLM 先验证长尾巡检任务,再决定是否进入定制训练。
Image -> Prompt -> State Rule -> Event系统集成
输出结构化 payload、截图和告警记录,对接业务系统与运维流程。
Camera -> Detector -> JSON -> Webhook开源发布
用 CosmoEdge 构建,再把它适配到现场。
CosmoEdge 在 Apache 2.0 协议下开放构建,正在准备 v0.1.0 公开版本,重点围绕 C++ 运行时、x86 开发模式、Sophon 部署路径、教程、API 参考和贡献流程展开。