OSD overlayDeploy video
AI as field-ready
edge systems.
Connect video streams, models, rules, and system output in one C++ edge runtime built for real deployments.
v0.1.0 preparingApache 2.0C++17 runtimeSophon BM168816-channel CV verified
Field AI infrastructure
Not just algorithms. A reusable field AI base.
Real deployments need video ingestion, decoding, model execution, rules, live preview, alarms, snapshots, and system integration.
RTSPIPCNVR
CosmoEdgeEdge runtime
Model inference
Rule orchestration
System output
rule eventevidence frame{ api: true }See the complete engine workflow.
From task creation through live preview to downstream delivery, the videos show how the engine runs as one console.
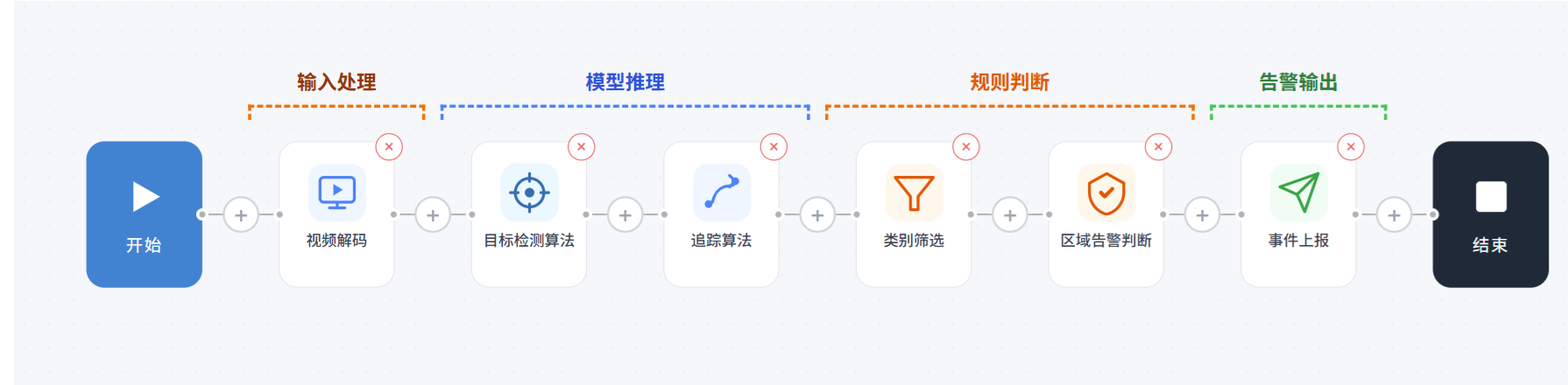
Visual pipeline
Connect video ingestion, inference, rules, and reporting as one task.
Prompt-driven AI
Bring GroundingDINO and VLM-based visual judgment to edge-side workflows.
Configurable applications, not one-off projects.
Video access, model inference, scene tasks, alarms, display, and output are modularized so teams can deliver, adjust, and replicate projects faster.
INBuild without rebuilding the stackConfigure inputs, models, rules, overlays, and delivery inside one workflow.
TPLSave pilots as reusable templatesOnce a scenario works, its rules, parameters, and outputs can be reused across more sites.
ITRTurn field feedback into iterationUse alarm review and task configuration to tune recognition, notifications, and operating rules over time.
Describe the task
before training another model.
Built-in multimodal capabilities help teams validate long-tail field scenarios with prompts before committing to new data collection and training cycles.
01Describe the targetDINO open-vocabulary detection quickly validates long-tail objects such as foreign items, debris, or temporary construction materials.
02Judge the visual stateVLM prompts inspect equipment states, human behavior, site conditions, and semantic visual changes.
03Turn perception into an eventRules, zones, snapshots, and MQTT / Webhook delivery make prompt-driven results reviewable and reportable.

Designed to be deployed, monitored, and integrated.
CosmoEdge is built for long-running edge systems, not one-off demos. It gives teams a place to manage running tasks, track resource usage, review alarm history, and connect downstream systems.
Multi-camera tasksRuntime overviewModel resourcesAlarm recordsMQTT / WebhookEdge hardware


Quick Start
Start on x86, deploy to edge hardware when ready.
Use x86 developer mode as the shortest validation path, then follow the full tutorial for commands, screenshots, and checks.
Developer path
Validate the runtime, then move into the full tutorial.
Bring up the local stack, open the console, create one scenario task, and confirm event delivery before moving the same workflow toward Sophon BM1688 deployment.
Decoupled layered architecture.
Algorithms, applications, and hardware can iterate independently, then converge in one edge intelligence hub.
CosmoEdge Edge Intelligence Hub
DeliverableRepeatableContinuously Evolving
CosmoEdge Ready Device
Hardware, models, and delivery support in one package.
Open source gives you the engine, web console, and workflow.
Certified device packages add preconfigured Sophon BM1688 acceleration, production models, scenario presets, and field deployment support for common tasks such as person detection, vehicle analytics, helmet recognition, fire / smoke, intrusion, line crossing, and integration pilots.
Full hardware specifications and certified configurations will ship with the v0.1.0 public release.


Built for solution teams turning vision AI into field systems.
Safety monitoring
Detect helmets, intrusion, fire, smoke, and zone violations with traceable records.
RTSP -> YOLO -> Zone Rule -> MQTT AlertTraffic and flow analytics
Track people, vehicles, line crossing, occupancy, and multi-camera flows.
Camera -> Tracker -> Line Rule -> Count OutputVisual inspection
Use VLM prompts to inspect equipment states, site conditions, and long-tail scenarios.
Image -> VLM Prompt -> State Rule -> EventSystem integration
Deliver snapshots, alarms, and structured payloads into downstream business systems.
Detector -> JSON Payload -> WebhookOpen source launch
Build with CosmoEdge, then adapt it for the field.
CosmoEdge is Apache 2.0 licensed and preparing its public v0.1.0 release around the C++ runtime, x86 developer mode, Sophon deployment path, tutorials, API references, and contribution workflow.