title: "卷三:VLM / DINO 指南" description: 理解 VLM 和 DINO 两种大模型工具的能力与边界,学会用"写一句话"定义全新的检测规则。 prev: text: "卷二:场景配置" link: /tutorials/02-scenario-config/scenario-config next: text: "卷四:Pipeline 编排" link: /tutorials/04-pipeline-orchestration/pipeline-orchestration
卷三:VLM / DINO 指南
阅读时长:30-40 分钟 目标:理解 VLM 和 DINO 两种大模型工具的能力与边界,学会用"写一句话"的方式定义全新的检测规则 前提:已完成 场景配置指南(第二册),熟悉基本的算法配置流程 无需额外设备:本册全程使用内置演示视频 + 图片测试功能,无需摄像头
为什么需要这一章?
一个你一定遇到过的问题
在使用第二册中的 18 条内置算法时,您可能已经发现:这些算法覆盖了最主流的检测场景——安全帽、火焰、跌倒、客流……但您的客户总会提出它们覆盖不到的需求:

- "楼道里有没有垃圾?"
- "消防柜的门关了没有?"
- "垃圾桶是不是满了?"
- "施工围挡有没有倒?"
- "城墙有没有被人为破坏?"
每一个这样的需求,如果走传统定制模型的路径,通常意味着:
| 步骤 | 工作量 | 时间 |
|---|---|---|
| 采集现场图片 | 500-2000 张 | 1-2 周 |
| 数据标注 | 人工逐张标框/标类别 | 1-2 周 |
| 模型训练 + 调优 | 需要 GPU 服务器 + 算法工程师 | 1-2 周 |
| 边缘端部署 + 适配 | 模型转换 + 性能调优 | 3-5 天 |
| 现场验证 + 迭代 | 精度不达标需重新采集和训练 | 不确定 |
一个定制场景,从需求到上线少则一个月,多则反复迭代。 而您的客户可能同时提出 5 个、10 个这样的需求。
系统为您提供了两个大模型工具
CosmoEdge 内置了两种大模型能力,分别解决不同类型的长尾需求:
| VLM(视觉状态判断) | DINO(开放目标检测) | |
|---|---|---|
| 一句话定位 | 判断画面中的状态(是/否、开/关) | 找到画面中的目标在哪里(画检测框) |
| 输入方式 | 写一段提示词 | 写一个目标名称 |
| 输出方式 | YES / NO | 检测框 + 置信度(和 CV 小模型一样) |
| 典型场景 | "楼道里有垃圾吗?" → YES | "垃圾" → 画面上标出垃圾位置 |
| 在画面上的表现 | 无检测框,结果在告警面板显示 | 有检测框,直接叠加在视频画面上 |
| 分析速度 | 每帧 ~2-3 秒 | 每帧 ~1-2 秒 |
简单记忆:
- 想知道 "是不是" → 用 VLM
- 想知道 "在哪里" → 用 DINO
两者都不需要训练模型、不需要标注数据,写一句话就能启用。接下来我们依次学习它们的用法。
大模型的能力边界(请务必阅读)
在开始使用之前,请先了解这两种工具能做什么和不能做什么,建立正确的预期。
✅ 适合大模型的场景
| 场景特点 | 适用工具 | 示例 |
|---|---|---|
| 状态判断(是/否、有/没有、开/关) | VLM | "消防柜门关了吗?" → YES/NO |
| 简单分类(几种状态选一个) | VLM | "指示灯是红色、绿色还是黄色?" |
| 开放类别检测(找到某种目标的位置) | DINO | "灭火器" → 画面上标出位置 |
| 罕见/长尾场景(无法获取训练数据) | VLM / DINO | "城墙破坏痕迹" — 不可能做训练数据集 |
| 低频巡检(每几秒判断一次即可) | VLM / DINO | 每 2.5 秒分析一帧,足以满足巡检需求 |
| 快速验证可行性 | VLM 图片测试 | 上传事件案例素材,批量得到判断结果 |
❌ 不适合大模型的场景
| 场景特点 | 原因 | 建议方案 |
|---|---|---|
| 需要实时检测(< 100ms 响应) | 大模型推理需要 1-3 秒/帧 | 使用第二册的 CV 小模型 |
| 需要精确计数(有几个人/几辆车VLM不适用) | 大模型不擅长空间定量 | 使用检测 + 追踪的场景任务 |
| 超出设备性能(多路同时分析) | 大模型资源占用高 | CV 小模型支持 16 路并发 |
| 动作识别(连续性动作/状态) | 单帧判断能力有限 | 使用专用行为分析模型 |
一句话总结:大模型适合 "低频率、大范围、长尾需求" 的场景。它们不是要替代第二册中的 CV 小模型,而是覆盖 CV 小模型覆盖不到的那些定制化需求。三者互补,不是互替。
第一部分:VLM 视觉状态判断
VLM 的核心能力是:看一张图片,回答一个是或非的问题。
VLM 的工作流程
视频画面
↓
每隔几秒抽取一帧 ← 取帧频率(可配置)
↓
裁剪出您关注的区域 ← ROI 框选(您在画面上画框)
↓
将裁剪后的图片 + 您写的问题交给 VLM ← Prompt(您输入的一句话)
↓
VLM 回答:YES 或 N(或您设定的选项)
↓
如果回答触发告警条件 → 事件记录 + 告警通知场景一:河道漂浮物识别(手把手)
需求:河道管理人员需要知道是否有漂浮物,有则自动告警通知河道清理人员 为什么传统方案难做:漂浮物形态千变万化(叶子、塑料袋、瓶子、杂物……),训练一个覆盖所有垃圾形态的检测模型成本极高 VLM 的优势:不需要穷举漂浮物的样子——人能看出"这里有漂浮物",VLM 也能
1.1 配置 Prompt(核心步骤)
- 进入 河道漂浮物识别 算法
点击 场景任务 -> 河道漂浮物识别 -> 算法编排,进入算法编排界面。

VLM 大模型的编排通常分为4个步骤:
- 视频解码:解码RTSP流(确保分析事件在画面中肉眼可辨识)。
- 数据预处理:基于解码数据流、抽帧策略、ROI区域截取等完成大模型输入数据的预处理工作。
- 语言视觉大模型:将大模型输入的数据及提示词输入大模型,完成结果生成。
- 事件上报:大模型输出触发上报逻辑,结果上报系统。
- 修改提示词
点击 语言视觉大模型 节点,展开配置面板,进行修改提示词,修改完成后点击保存
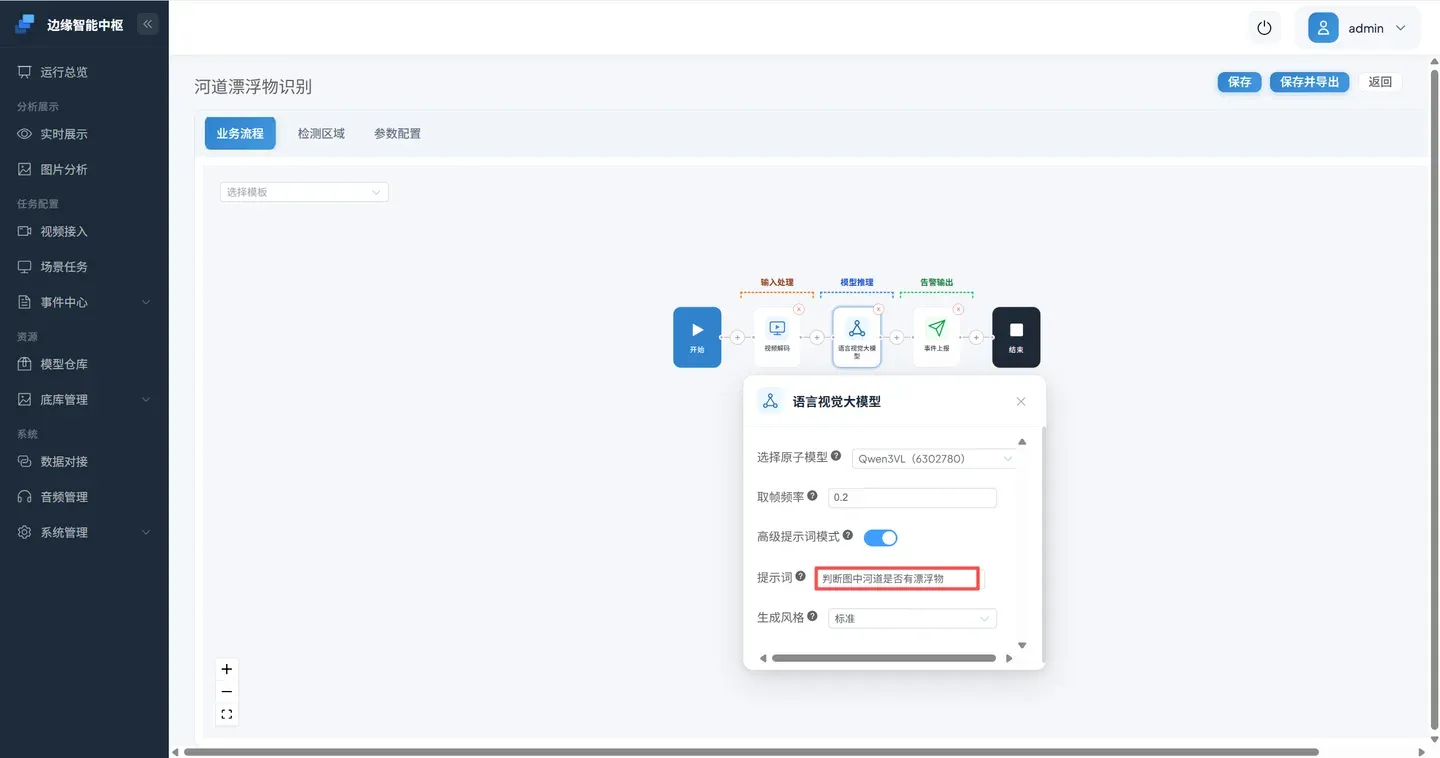
参数说明:
| 参数 | 作用 | 备注 |
|---|---|---|
| 选择原子模型 | 选择多模态大模型的类型 | |
| 取帧频率 | 每秒截取多少帧进行分析(fps;值越小,两次分析的间隔越长) | 由于大模型的算力要求较高,建议设置较小值以拉长分析间隔 |
| 高级提示词模模式 | 开启完整提示词配置 | 开启之后提示词需要一段完整的表达;不开启提示词只需要输入检测对象 |
| 提示词 | 输入提示词 | |
| 生成风格 | 大模型输出随机性控制 | 严谨代表输出随机性低;标准代表输出随机性正常;发散代表输出随机性高;自定义代表自定义随机性控制 |
参数选择如下:

补充功能
OpenAI三方模型接入
1.选择OpenAI接口
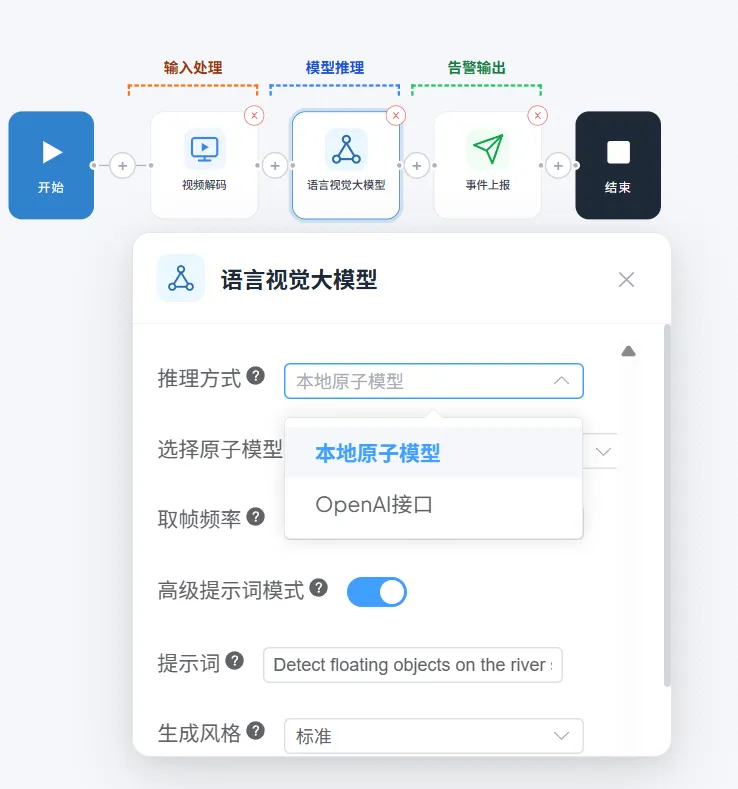
2.配置三方模型

1.2 选择 VLM 算法并绑定通道
- 下载视频
项目提供了演示的视频,视频地址:github.com/cosmo-wander-ai/cosmo-edge/releases/tag/v1.0-videos。
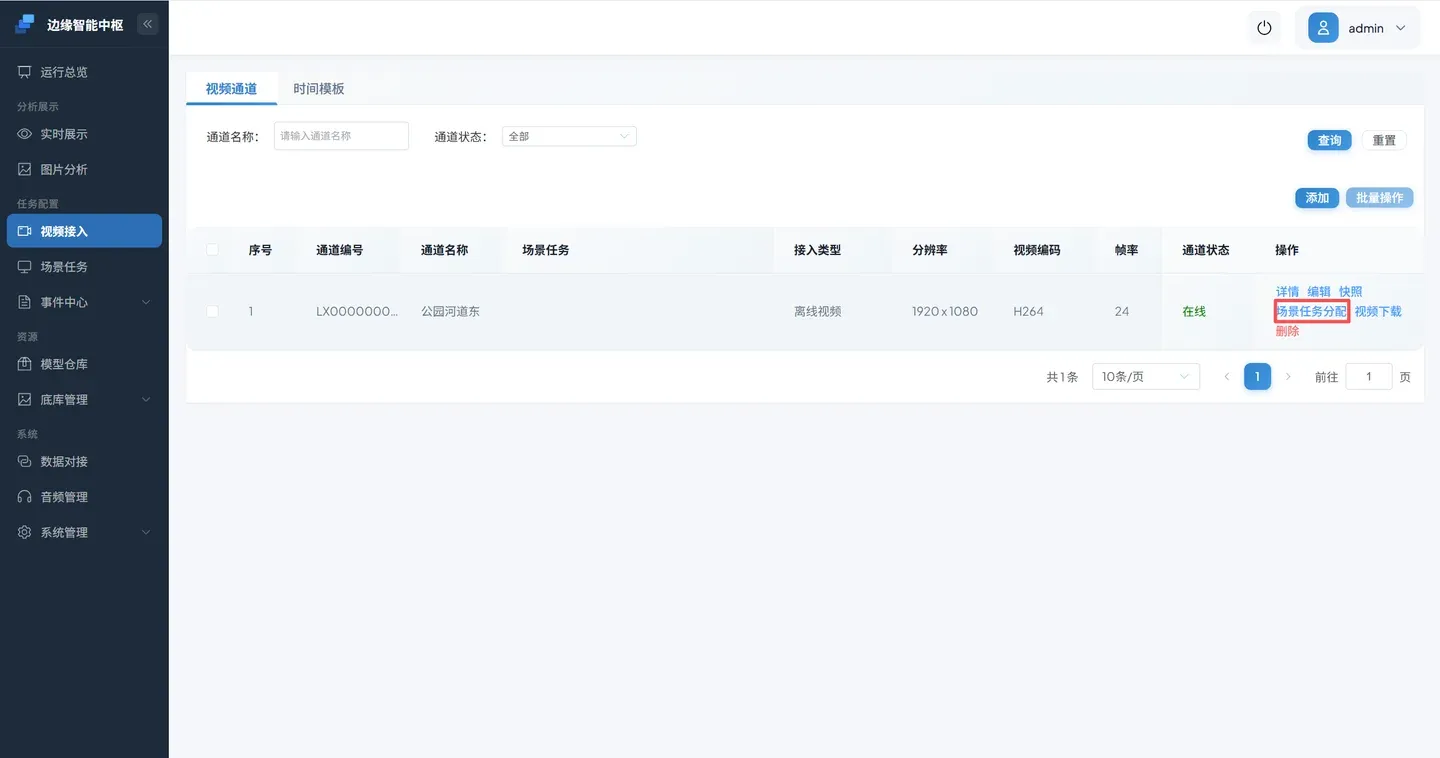
- 上传演示视频
点击 视频接入 ->添加 ->接入离线视频 ->进入场景任务分配。
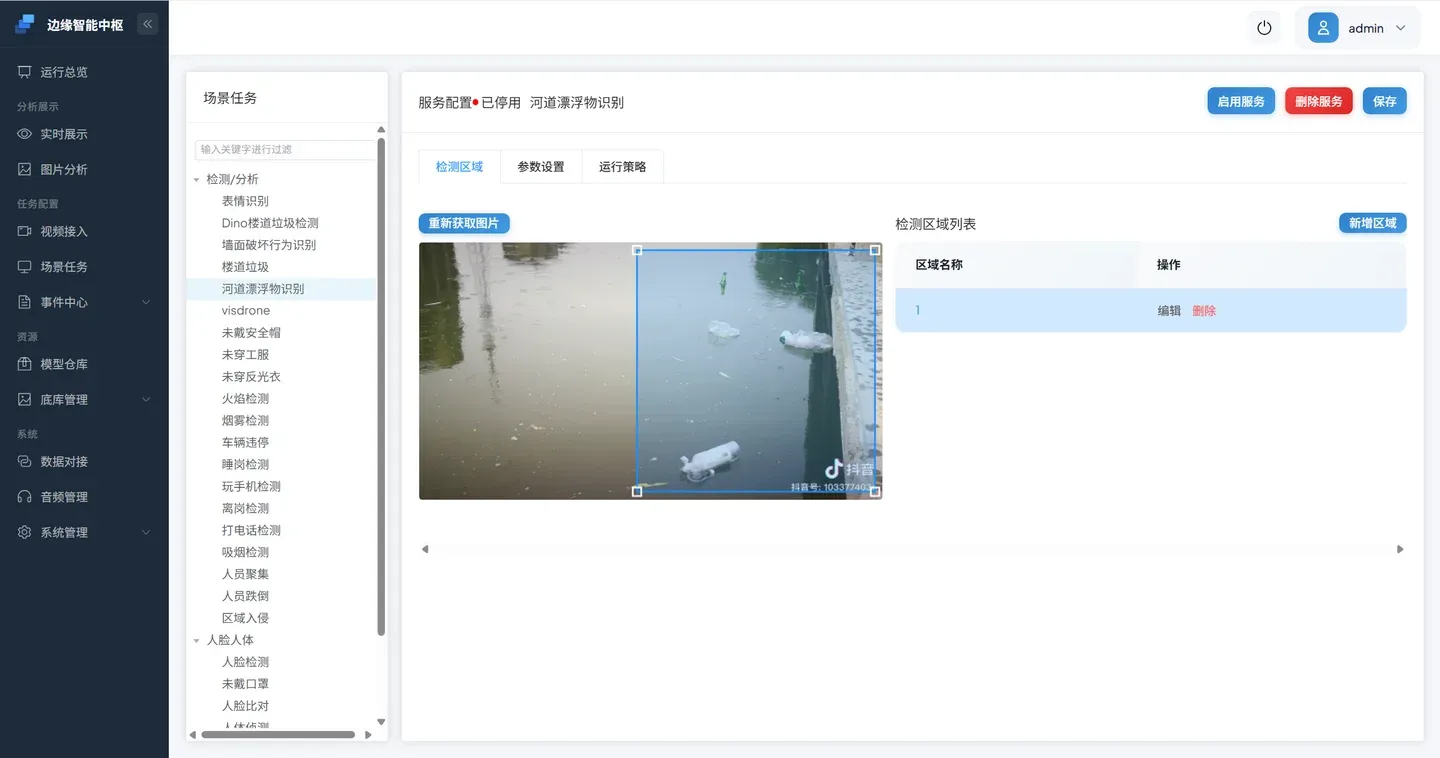
在** 所有服务 中选中 河道漂浮物识别,新增区域。**
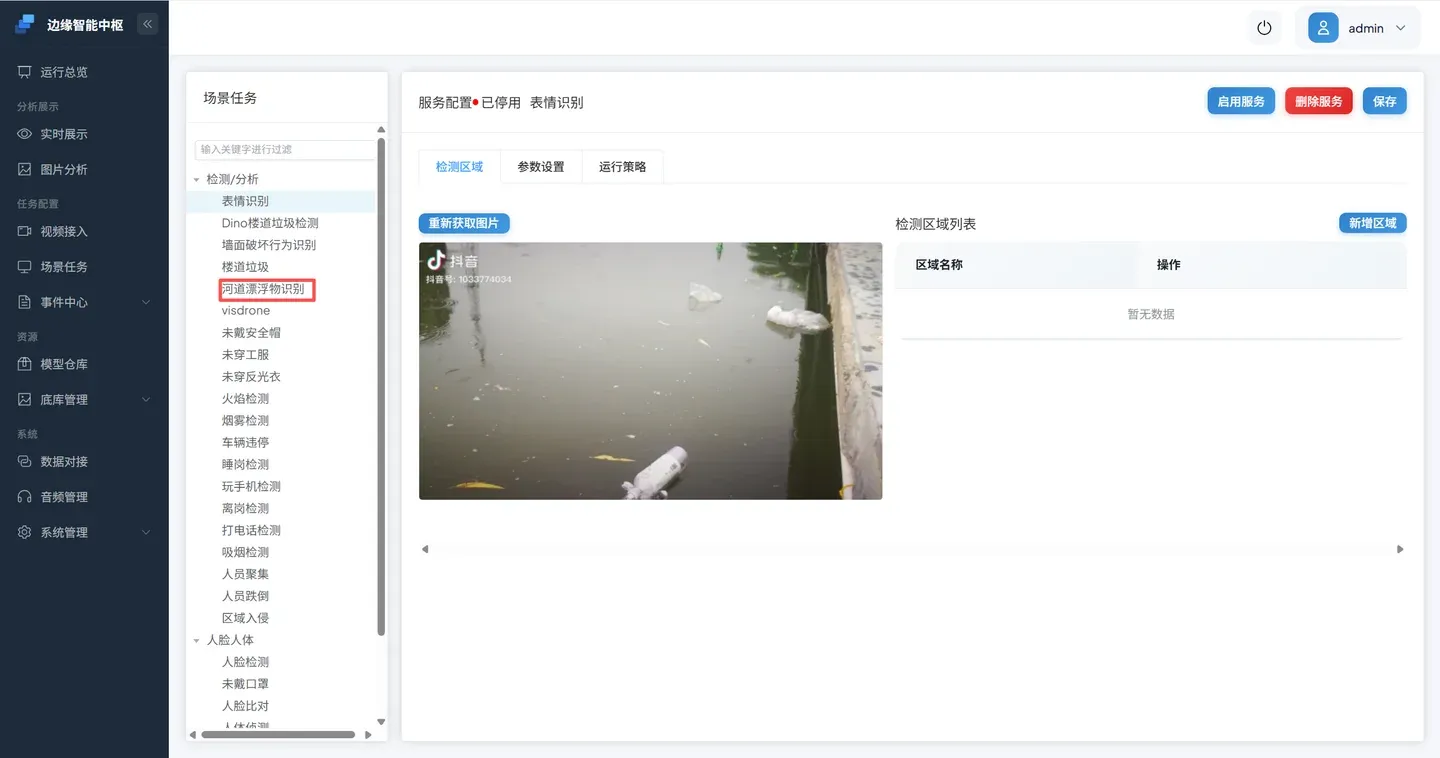
💡大模型默认检测区域是全屏
- 框选关注区域(ROI)
和第二册一样,您可以画一个区域让 VLM 只关注特定位置。框选的区域越精确,背景干扰越少,判断越准确。
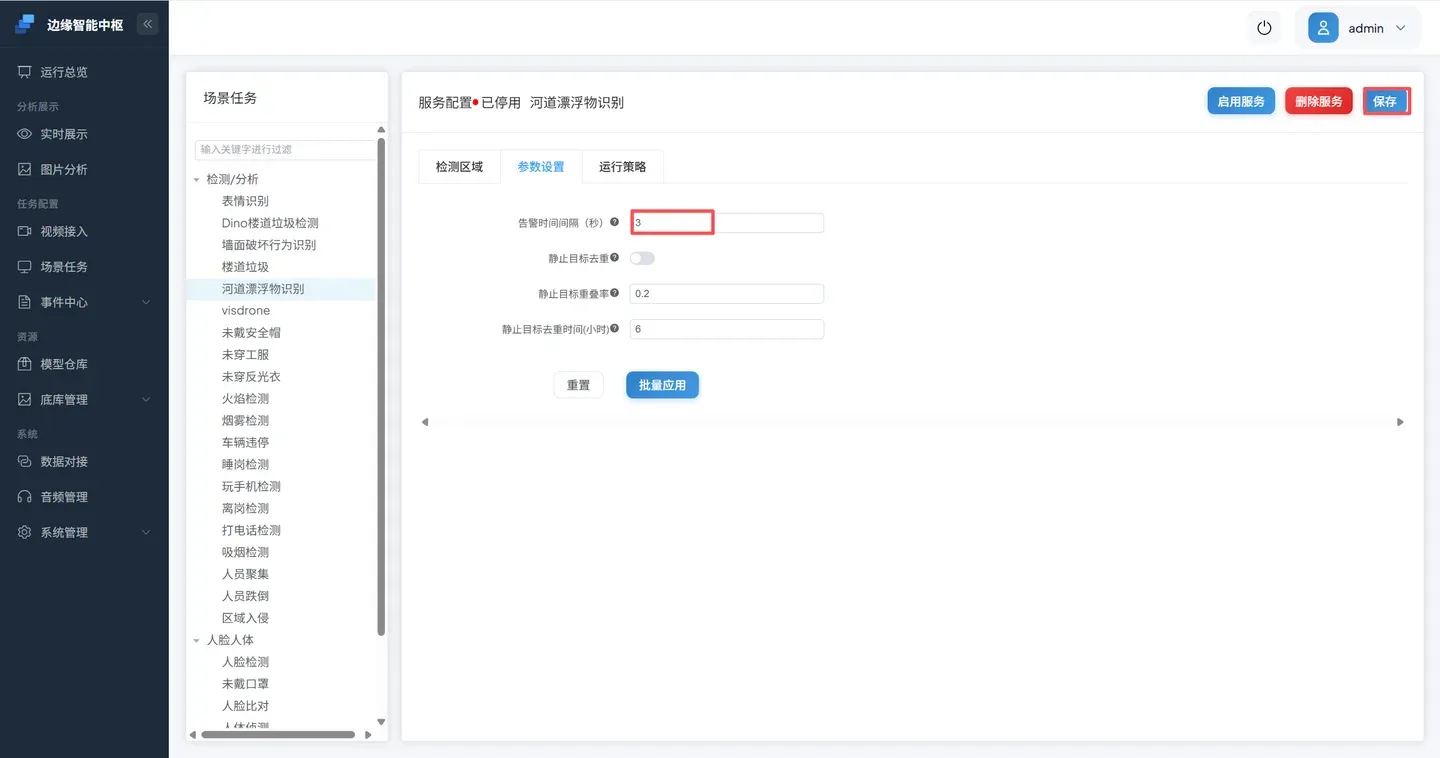
- 配置检测参数
切换到 **参数设置页面 **设置告警间隔,**保存 **按钮保存该配置,并启动服务。
1.3 查看检测效果
- 点击 实时展示 ->选择通道 ->算法叠加
算法叠加选择 河道漂浮物识别

告警弹出信息(大模型启动加载大约要半分钟,体积比较大,后续推理不受影响)

告警页面分析:
- 视频画面正常播放(VLM 不会在画面上叠加检测框,这是正常的)
- 右侧 告警面板 出现检测事件:
- 当河道有漂浮物时 → 触发告警,显示抓拍图片
- 当河道无漂浮物时 → 无告警
⚠️ 和第二册的视觉差异 第二册的 CV 小模型会在视频画面上实时画检测框。VLM 不会画框——它的结果显示在告警面板和事件记录中。这不是系统故障,是两种技术的输出方式不同:
- CV 小模型:告诉你"哪里有什么"(检测框)
- VLM:告诉你"画面中的状态是什么"(YES/NO)
1.4 事件查询
点击 事件中心 进入检测/分析,根据条件查询告警记录。
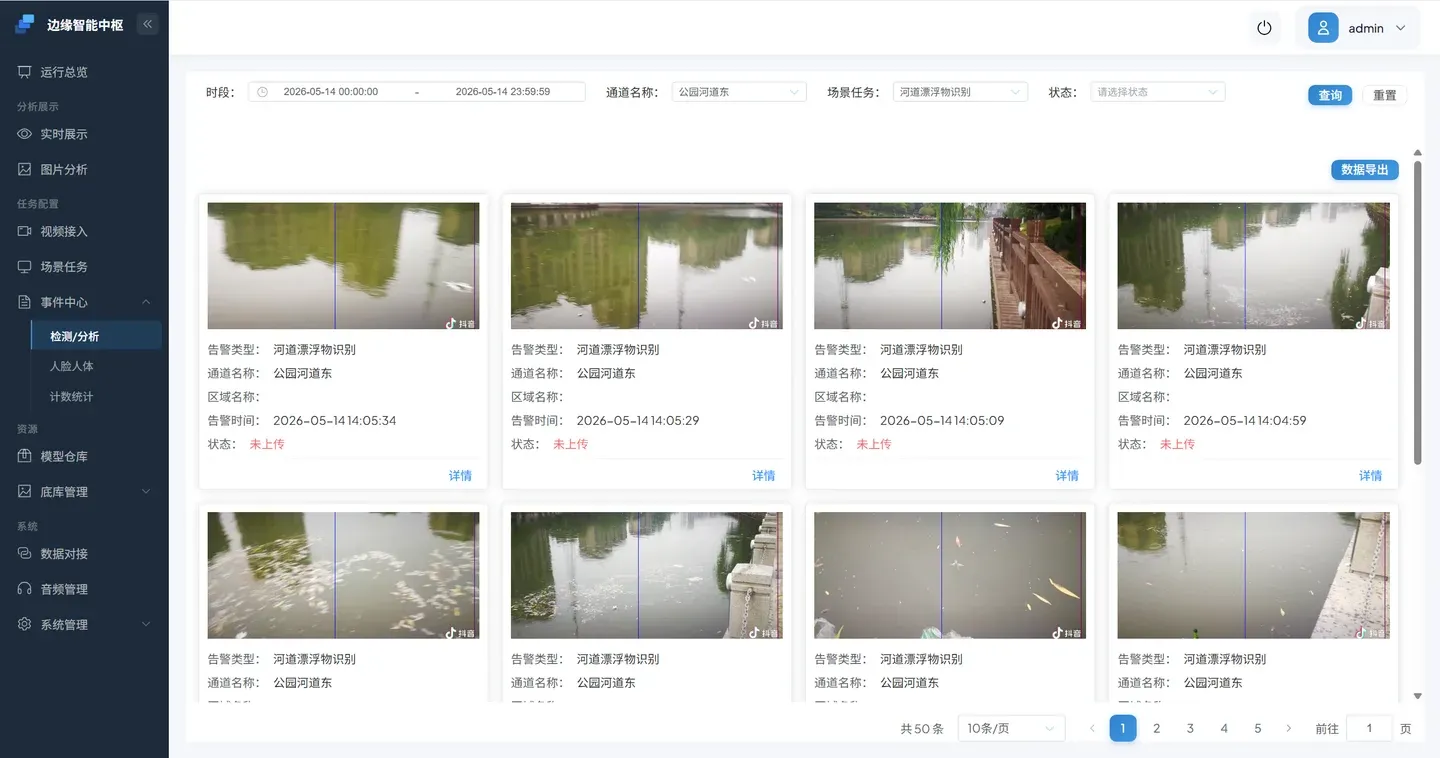
每条 VLM 告警包含:
- 抓拍图片:VLM 分析的那一帧画面
- 判断结果:YES(有漂浮物)或 NO(无漂浮物)
- 时间戳:判断发生的时间
点击告警图片,进入详情。右上角显示该告警信息

💡 与第二册的区别 第二册中您选择的是"未戴安全帽"等固定用途的算法。这里选择的是一个通用 VLM 引擎——它能做什么,取决于您接下来写的 Prompt。
到这里,您已经完成了第一个 VLM 场景的完整配置。
场景二:城墙破坏检测(从零验证一个全新需求)
需求:文保单位需要监控古城墙,检测是否有人为破坏痕迹 这个场景的特殊性:市面上没有AI 公司提供"城墙破坏检测"的现成模型。如果走传统定制路径,需求本身判定模式相对模糊,光"什么算破坏"的定义就够来回沟通相当长的时间。 本节的学习重点:不是操作步骤(和场景一基本相同),而是面对一个全新需求时,如何用图片测试快速验证可行性,以及如何迭代 Prompt。
2.1 先验证:这个需求 VLM 能不能做?
面对一个全新的定制需求,不建议直接接视频配 场景任务,因为视频中事件发生的频次可能很低,不容易快速验证结果。建议先用 图片测试 功能快速验证 Prompt 是否有效。
- 创建 城墙破坏检测 的 **VLM图片分析 **算法
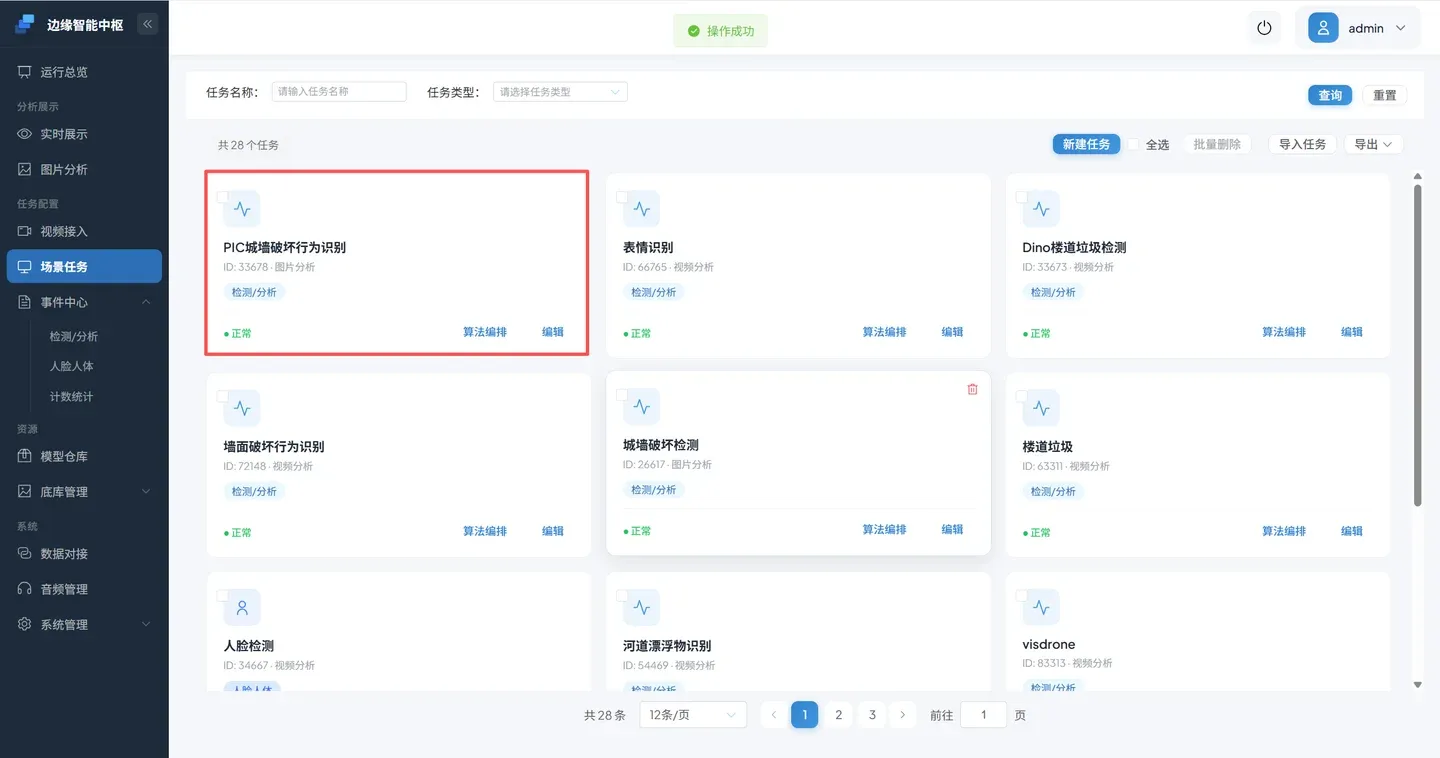
点击 场景任务进入场景管理页面,点击新建任务。
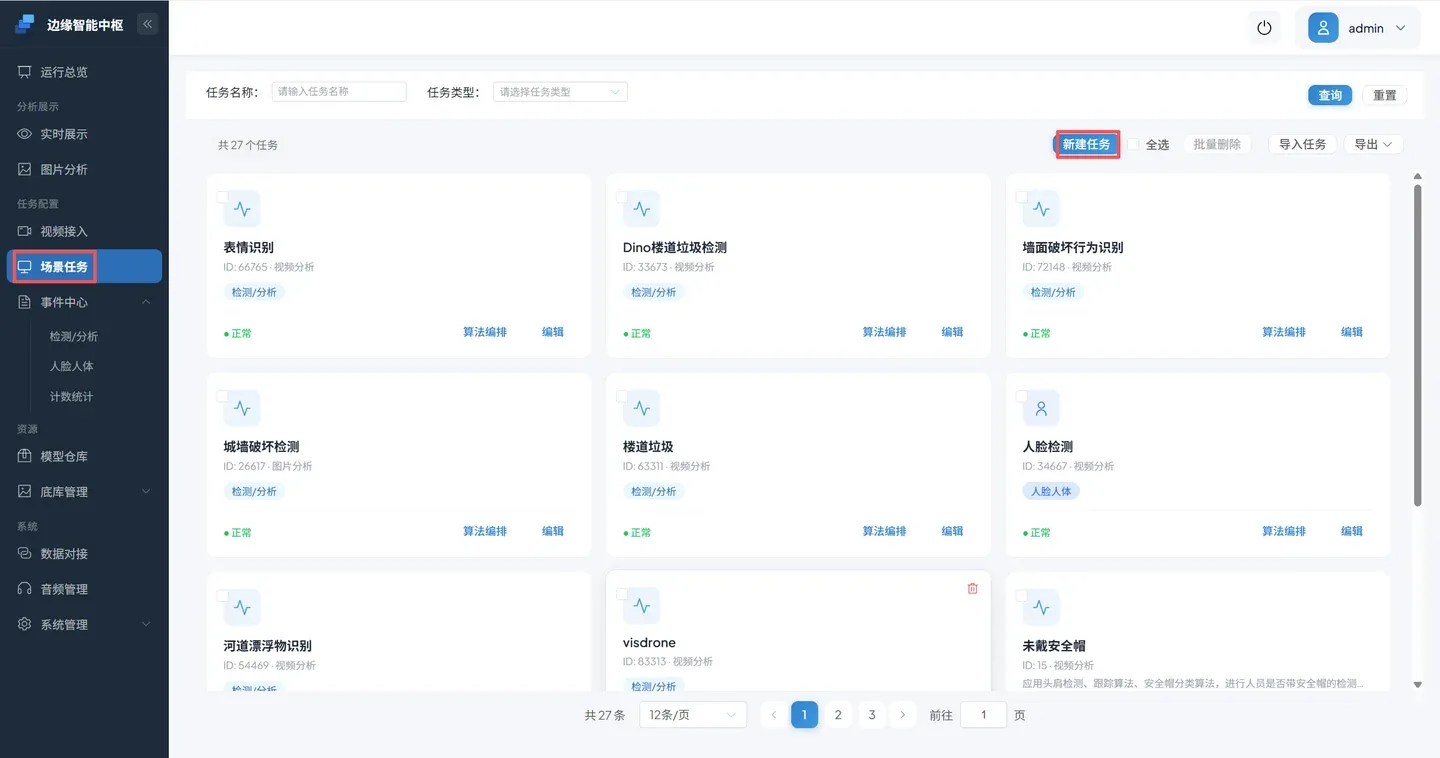
数据源类型选择** 图片分析**
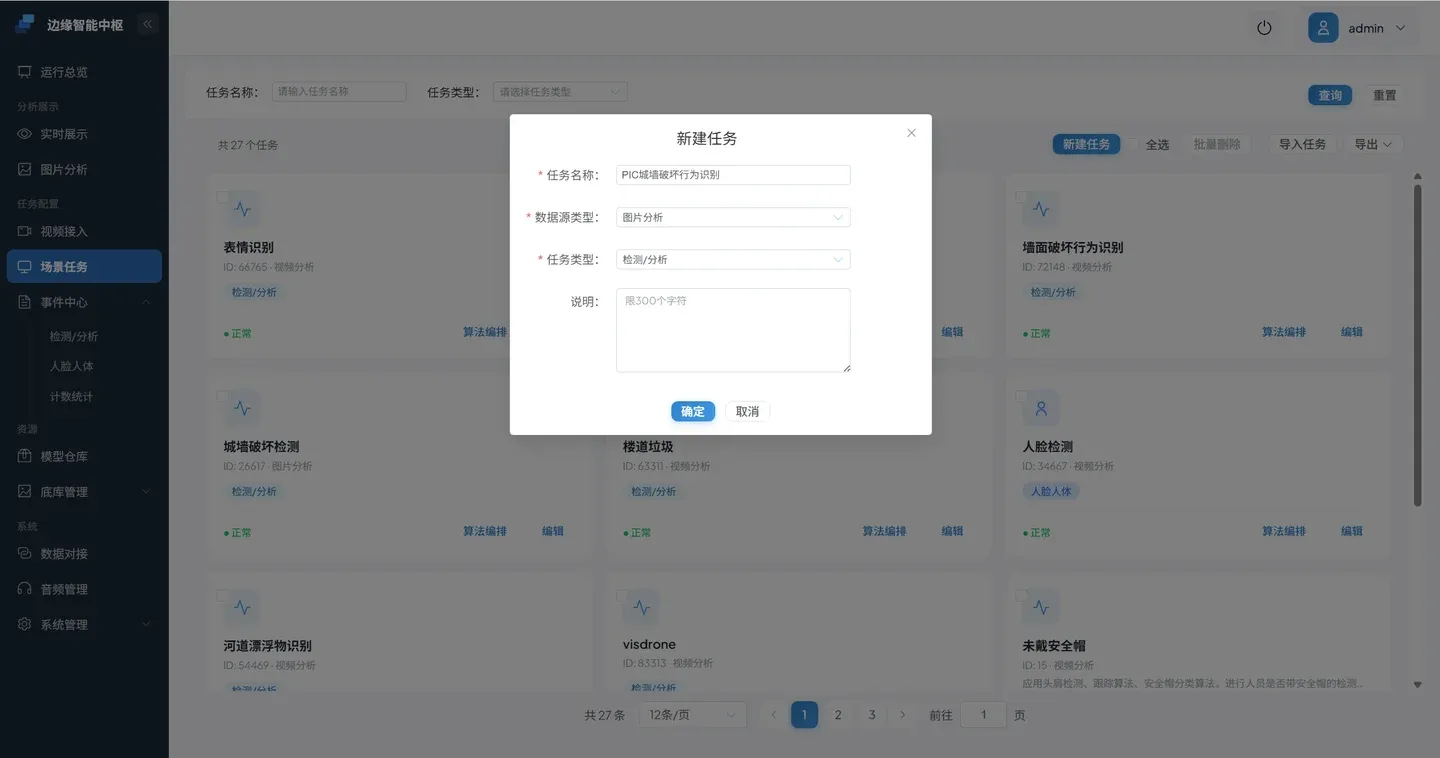
点击 **确定 **保存算法
点击 算法编排 创建编排流程,点击 操作 -> 添加组件 -> 语言视觉大模型 添加VLM组件。

整个流程只需要添加一个语言视觉大模型即可完成编排。
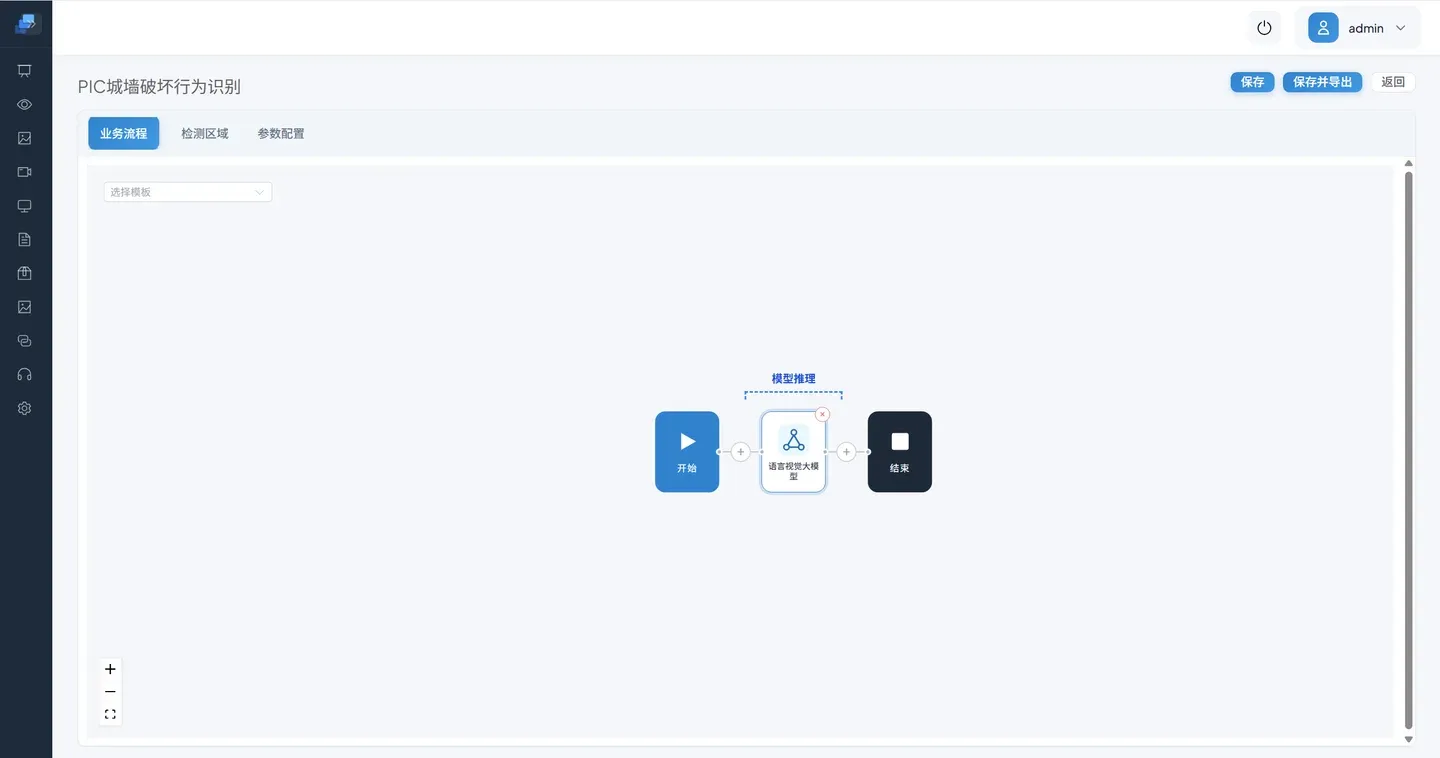
点击 语言视觉大模型 配置提示词,并保存。
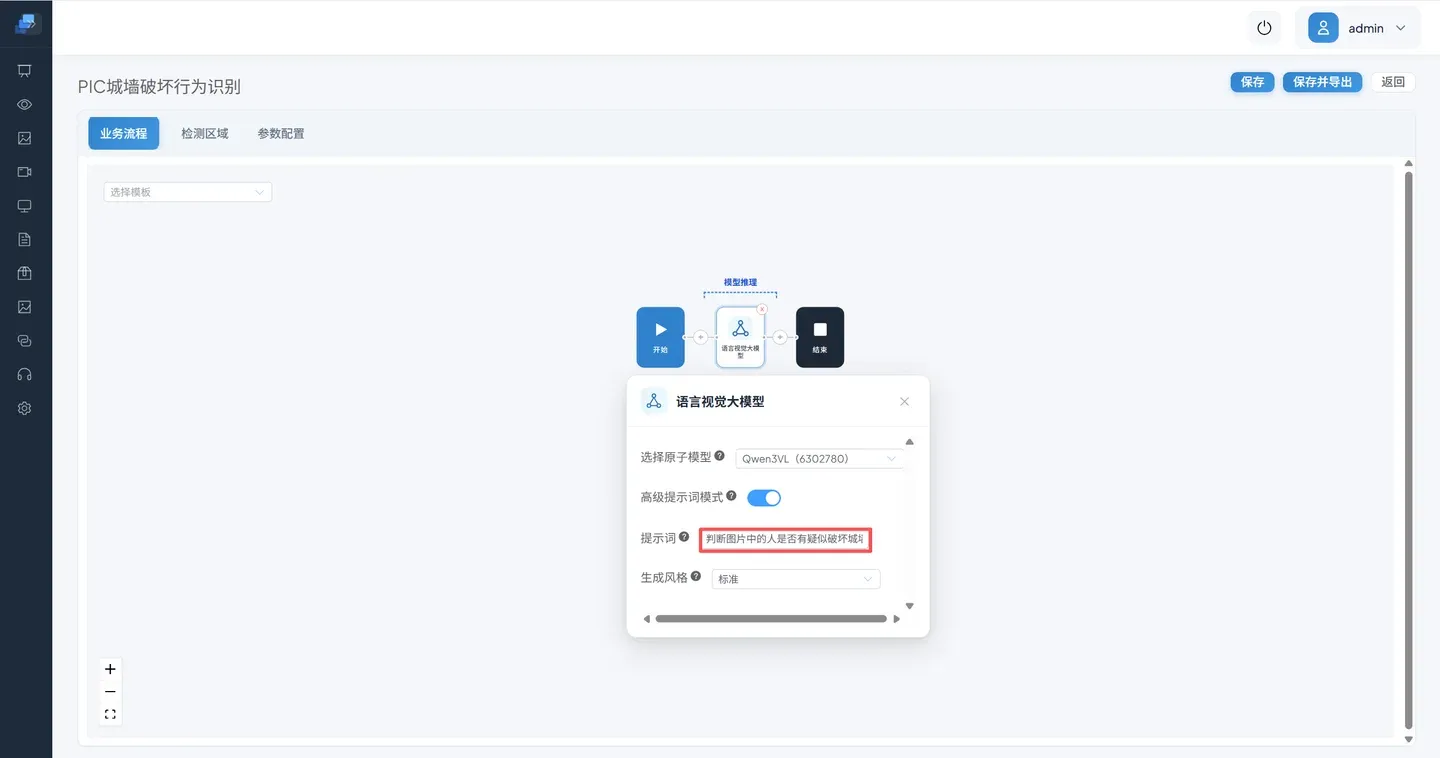
提示词: 判断图中的人是否有疑似破坏墙面的行为
以上就是一个VLM大模型编排的全部操作步骤
- 上传图片快速验证可行性
点击 图片分析 进入图片推理页面,选择算法PIC城墙破坏检测。
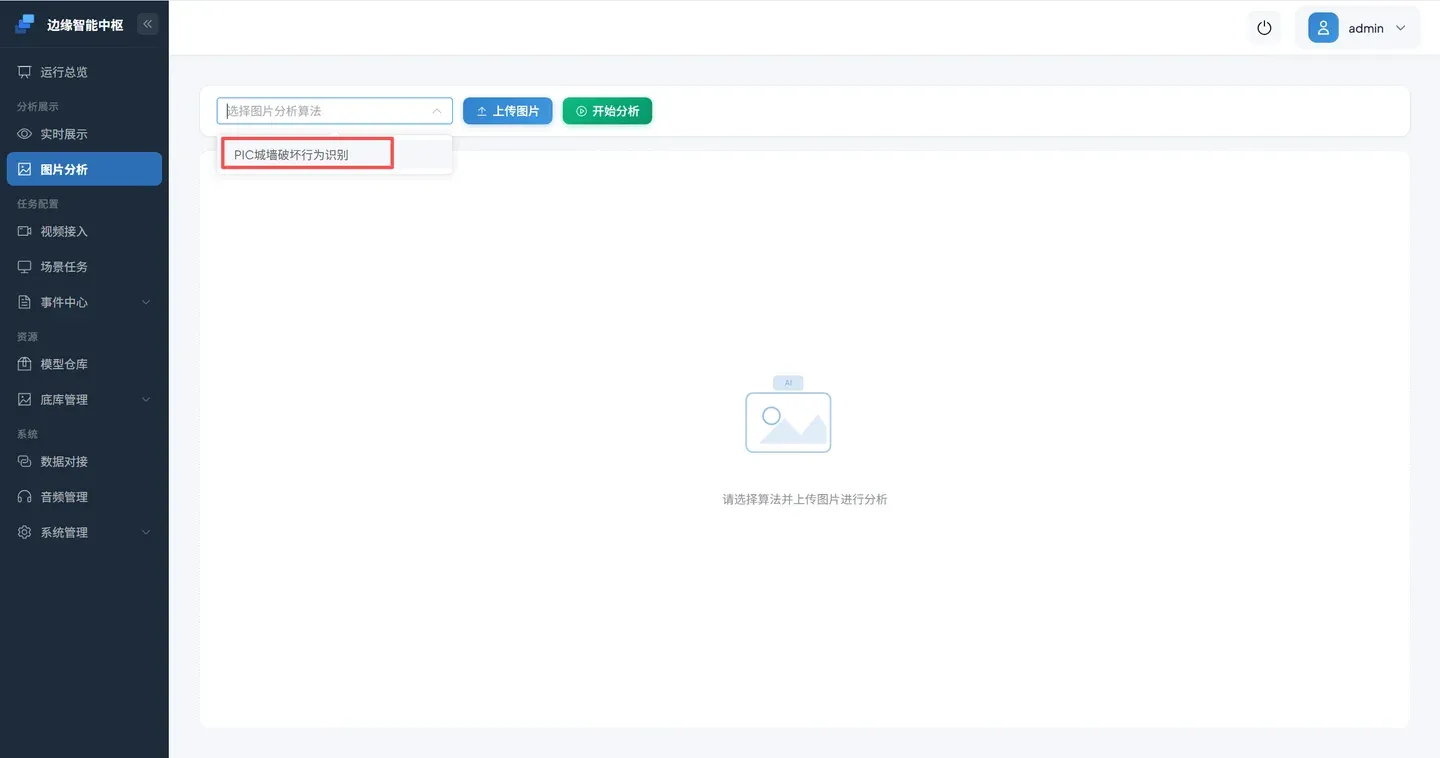
上传待分析的图片
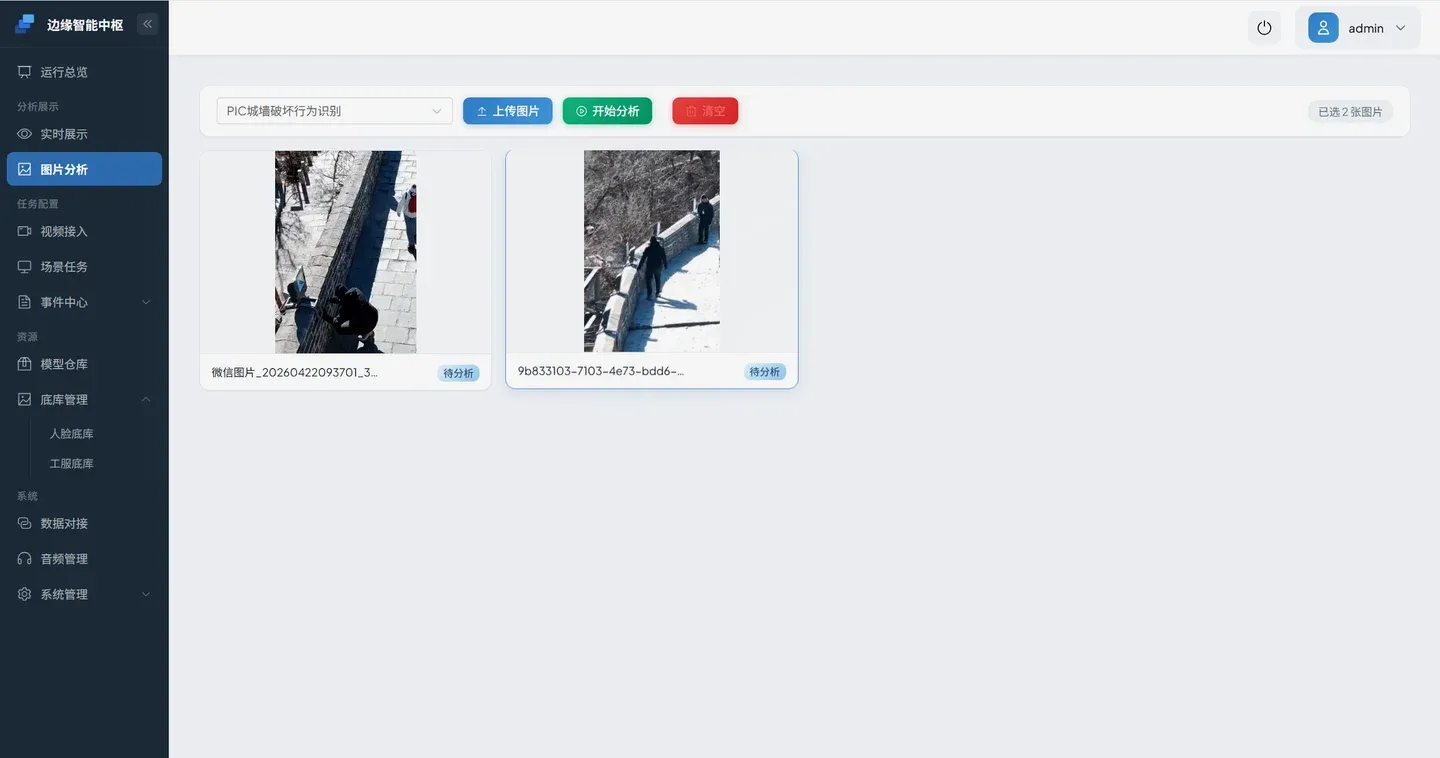
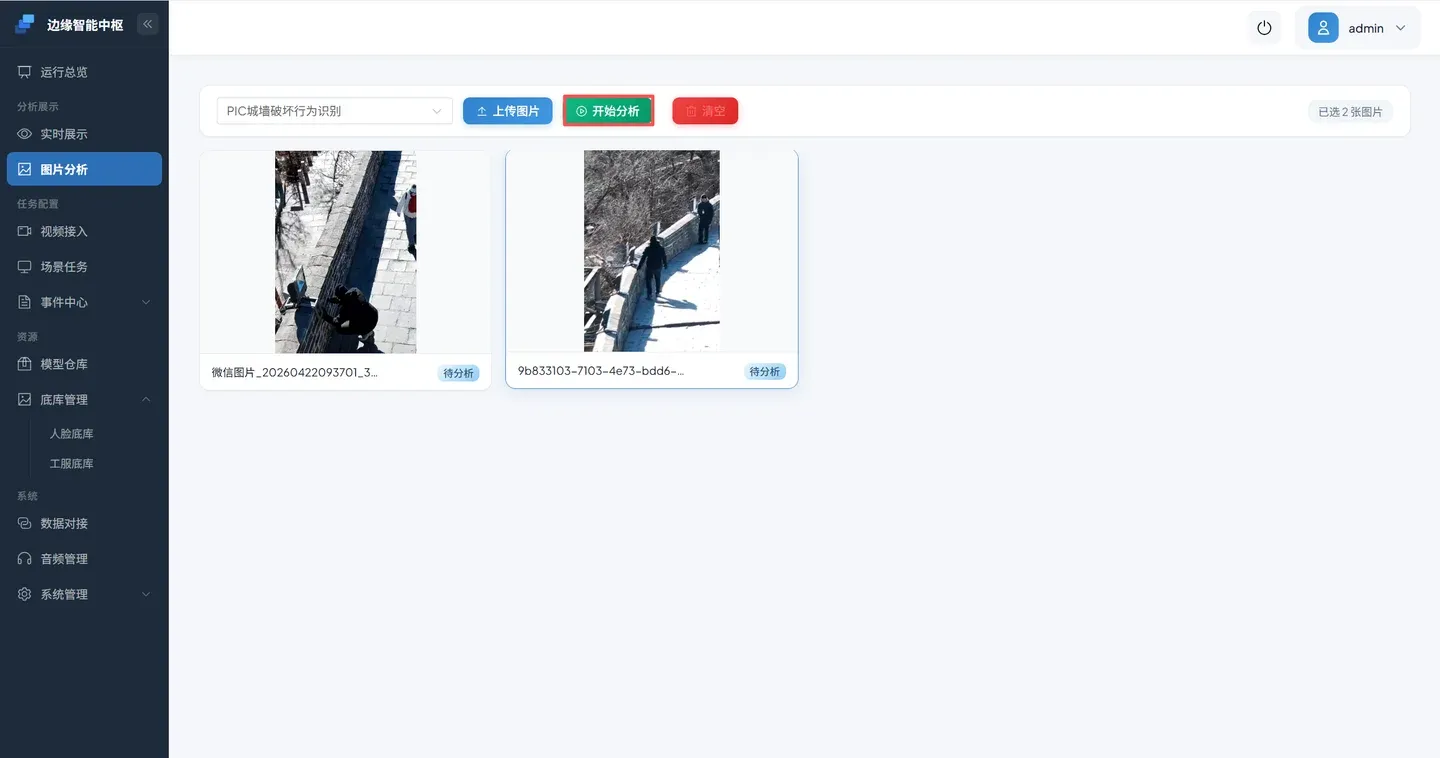
点击 开始分析,开始大模型分析图片(注:当前图片测试服务在此时开始创建,需要数秒钟大模型加载的时间)
分析完成
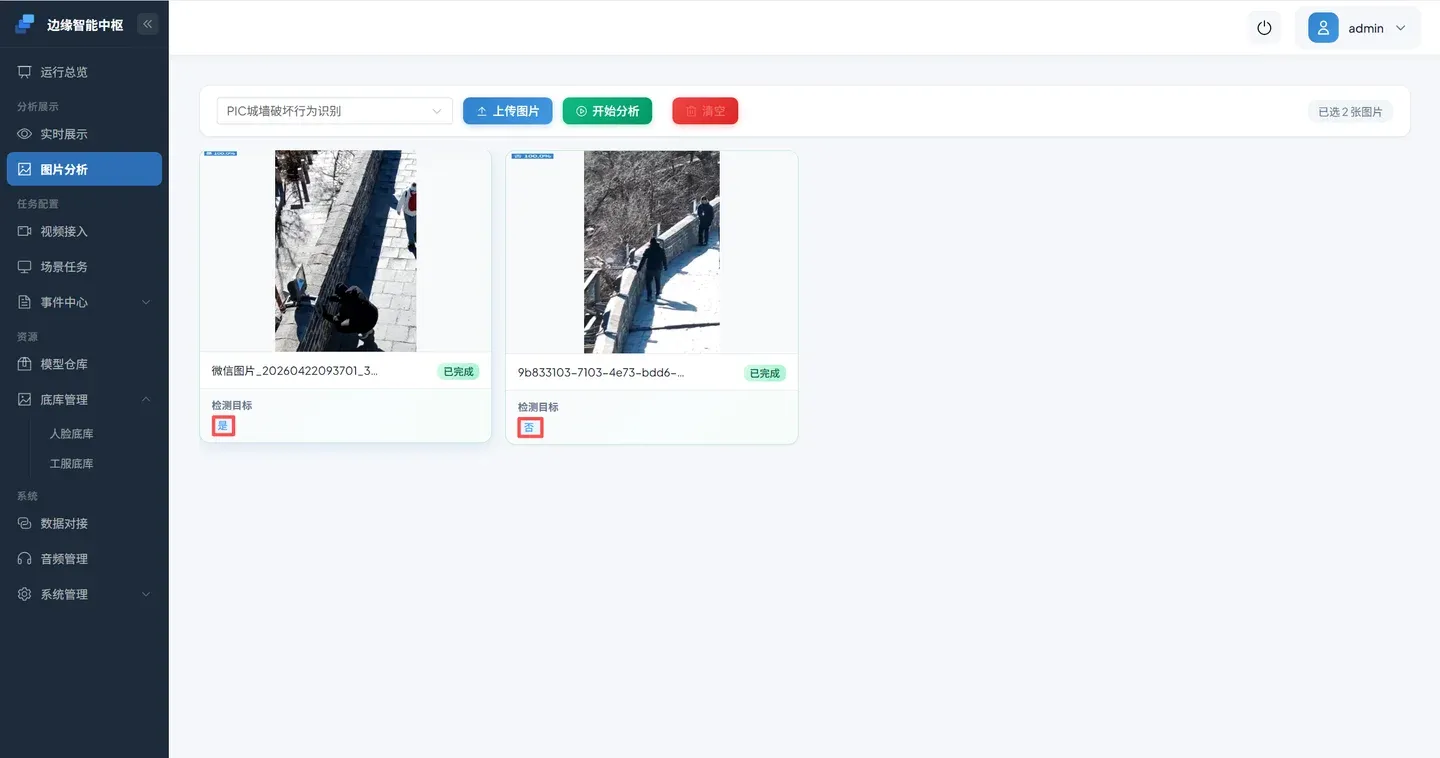
分析的结果包括存在和不存在两种结果,可以更进一步查看详细信息。
点击 检测目标是 的图片,查看置信度、逻辑结果等信息。
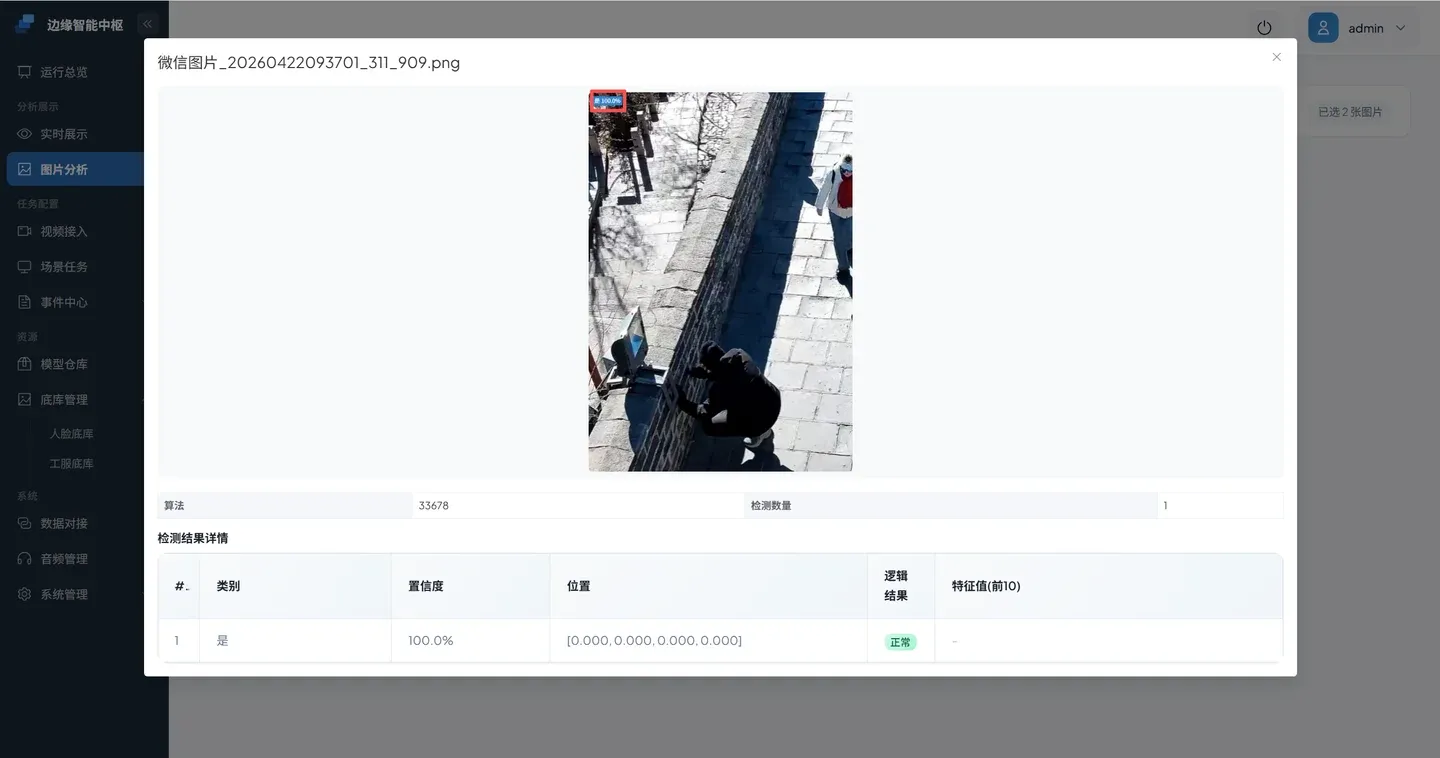
结果分析:
- 如果返回符合预期 → 判断正确,Prompt 可用
- 如果返回不符合与其或结果不稳定 → 需要调整 Prompt(见下节)
💡 图片测试的价值 不需要接视频、不需要配 场景任务、不需要在视频中等待事件发生的时段。筛选出实景事件图片,上传分析后即可拿到结果。这是验证"VLM 能不能做某个场景"成本最低的方式。 建议在每个新场景正式上线之前,都先用图片测试验证 Prompt,对于场景较为复杂,稳定性要求较高的场景,建议准备一定量级的正负样本图片,统计算法的误报及召回率等指标。
2.2 Prompt 迭代:如果第一版效果不理想
在实际使用中,第一版 Prompt 可能不够准确。以下是常见的调整方向:
情况一:漏报(有破坏但没检测到)
尝试让问题更具体,描述破坏的视觉特征:
❌ "城墙有没有问题?" ← 太模糊
✅ "城墙表面是否有裂缝、缺损或涂鸦?" ← 具体到视觉特征情况二:误报(没破坏但误报了)
尝试缩小判断范围,或调整 ROI 排除干扰区域:
❌ "城墙有没有被破坏?" ← "破坏"含义太广,自然风化也可能被判为破坏
✅ "城墙表面是否有明显的人为刻画或凿击痕迹?" ← 聚焦到"人为"+"具体形式"情况三:结果不稳定
- 检查 ROI 是否画得太大,包含了过多无关背景
- 尝试简化 Prompt,避免过于复杂的描述
- 筛选多张图片进行多次测试,确认稳定性
Prompt 迭代的一般思路:
写一版 Prompt → 用图片测试验证(正样本 + 负样本)
↓ 效果不好
分析原因(漏报 or 误报 or 不稳定)→ 调整 Prompt → 再验证
↓ 效果满意
正式接视频,配置为持续运行的场景任务配置好VLM Prompt 的关键
| # | 规则 | 说明 |
|---|---|---|
| 1 | 问封闭式问题 | 只问能回答"是/否"或"A/B/C"的问题,不要问开放式问题 |
| 2 | 问看得见的事物 | VLM 只能分析图像内容,确保问题涉及的内容在画面中可见 |
VLM — 好 Prompt vs 坏 Prompt
| ✅ 好的 Prompt | ❌ 坏的 Prompt | 问题出在哪 |
|---|---|---|
| "楼道中是否有垃圾?" | "描述一下楼道的情况" | 开放式,输出不可控 |
| "地面是否有积水?" | "地面湿不湿?" | "湿"不是视觉特征,难以判断 |
| "消防柜门是否关闭?" | "消防柜有没有问题?" | 太模糊,什么算"有问题"? |
| "指示灯是红色还是绿色?" | "设备有几个指示灯?" | VLM 不擅长计数 |
| "城墙表面是否有人为刻画痕迹?" | "城墙坏了吗?" | "坏"含义太广 |
2.3 验证通过后,配置成正式 视频分析场景任务
Prompt 在图片测试中验证通过后,按照场景一相同的步骤配置到实际视频通道:
- 绑定 VLM 算法到城墙监控视频通道
- 填写验证通过的 Prompt
- 画 ROI 框选城墙主体区域
- 设置取帧频率(文保巡检场景建议设为
0.1,即每 10 秒分析一次,已足够) - 进入 「实时展示」 验证效果
这些步骤的详细操作已在场景一中讲解,此处不再重复截图。
第二部分:DINO 开放目标检测
前面两个场景中,VLM 回答的是"是不是"的问题——它告诉您画面的状态,但不会告诉您目标在画面的哪个位置。
有些场景的需求不同。比如:
- "我想在画面中找到所有的灭火器,看它们放在哪里"
- "我想标出画面中所有出现的猫/狗/异常物品"
- "我想让系统框出施工区域里的所有工具"
这类需求要的不是 YES/NO,而是检测框——和第二册的 CV 小模型一样的输出形式,但不需要训练。
这就是 DINO 做的事:您写一个目标名称,系统自动在画面中找到所有匹配的目标并画框。
DINO 的工作流程
视频画面
↓
每隔几秒抽取一帧 ← 取帧频率(可配置)
↓
将画面 + 您输入的目标名称交给 DINO ← 提示词(如"垃圾")
↓
DINO 在画面中找到所有匹配目标,输出检测框 + 置信度
↓
检测框叠加到视频画面上 ← 和 CV 小模型一样的 OSD 显示
↓
如果检测到目标 → 事件记录 + 告警通知场景三:开放场景目标检测(精简操作)
需求:在楼道画面中检测并标出 "person"(人员)和 "garbage"(垃圾)的具体位置 与 VLM 楼道垃圾的对比:VLM 只告诉您"有没有垃圾",DINO 会告诉您"垃圾在画面的哪个位置"
DINO 的配置流程和 VLM 高度相似,以下只说明关键差异。
3.1 配置提示词
VLM 的提示词是一个问题,DINO 的提示词是一个目标名称(或多个名称用英文句号 . 分隔)。在使用DINO之前先配置提示词。
- 点击 算法管理 ->Dino楼道垃圾检测算法 ->算法编排->检测视觉大模型 ->配置提示词 ->保存退出。
在提示词中输入您想检测的目标,本算法中输入提示词:
person.garbage注意:提示词之间使用英文句号间隔
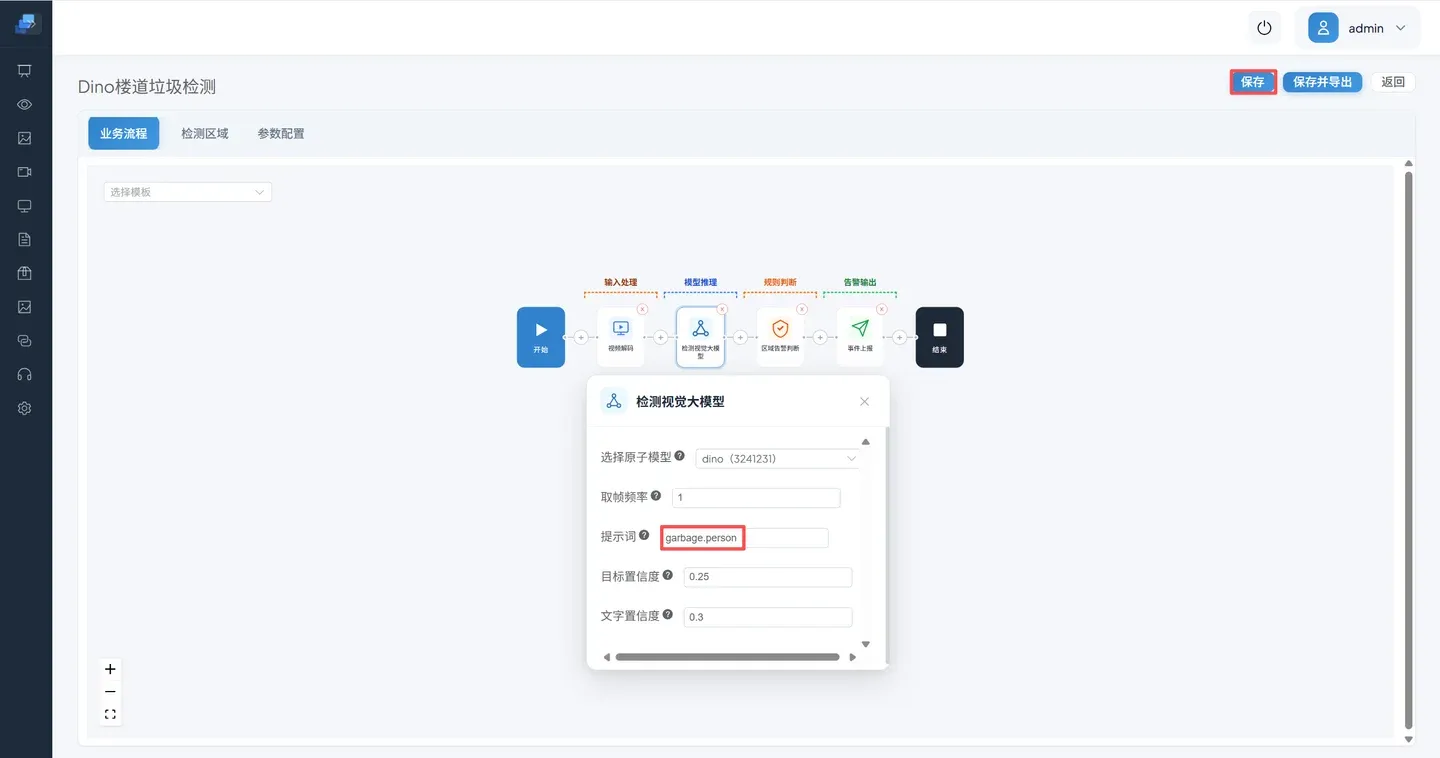
⚠️ DINO 提示词使用英文
3.2 绑定 DINO 算法
- 进入 视频接入,场景任务分配。
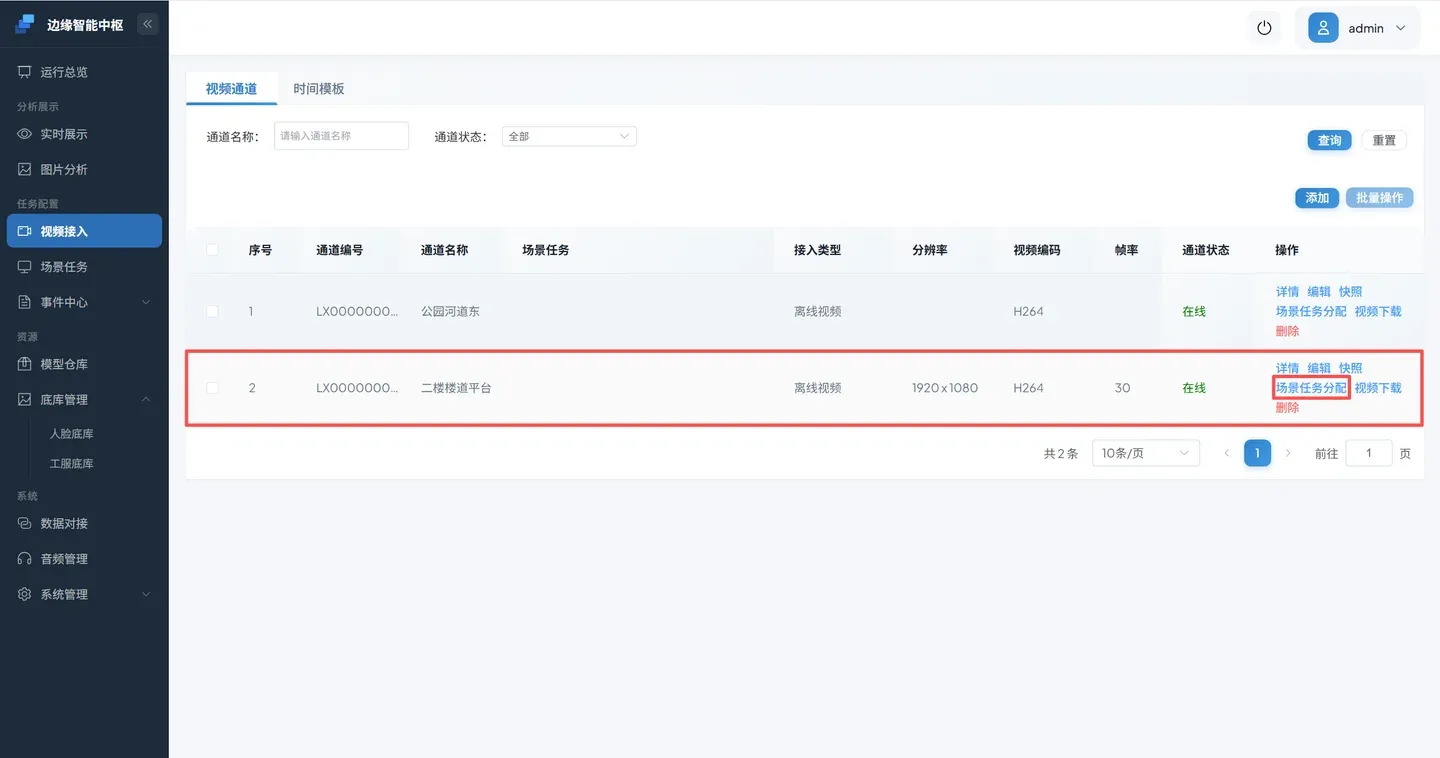
- 服务分配 中选择 DINO 类型的算法,新增区域。
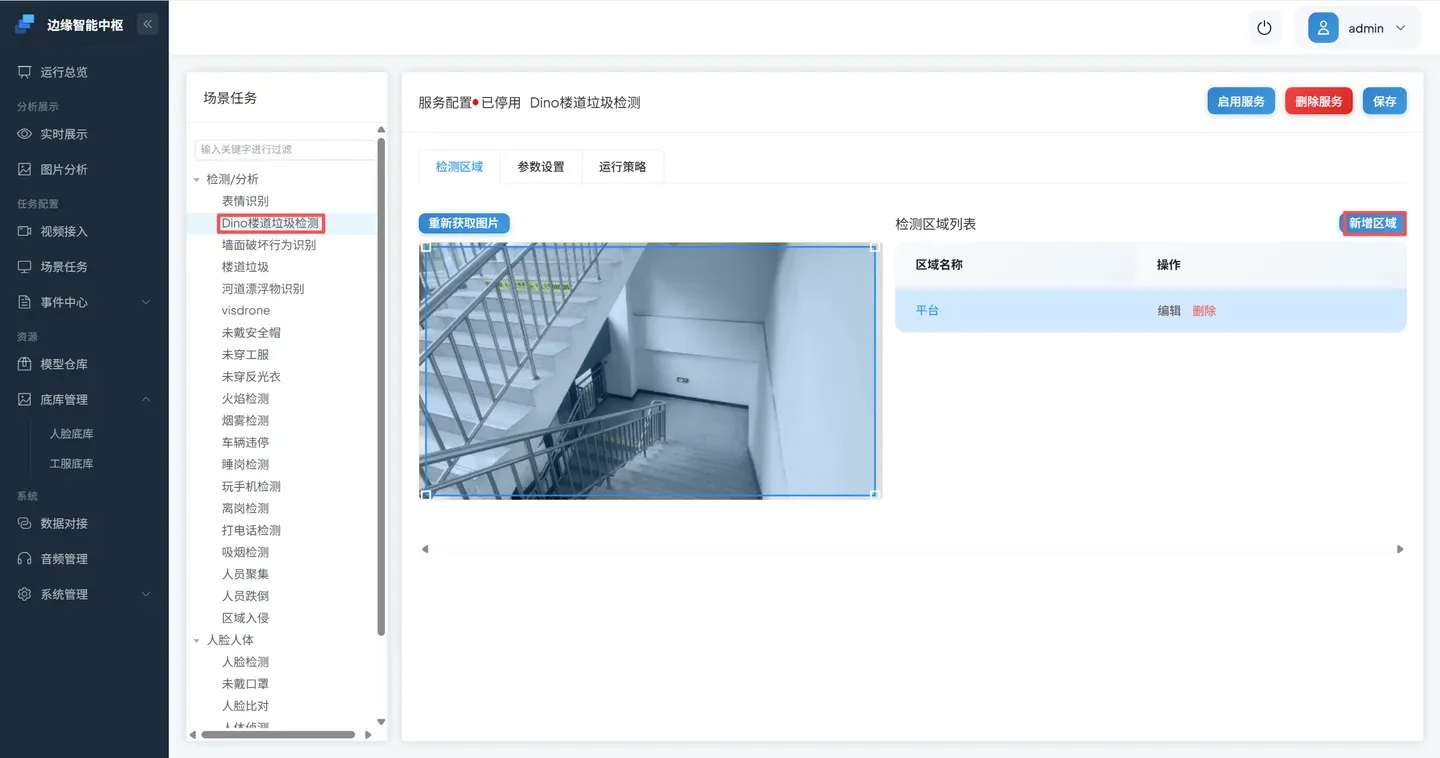
- 调整区域位置
调整检测区域到合适的位置,本场景中调整检测区能够覆盖平台
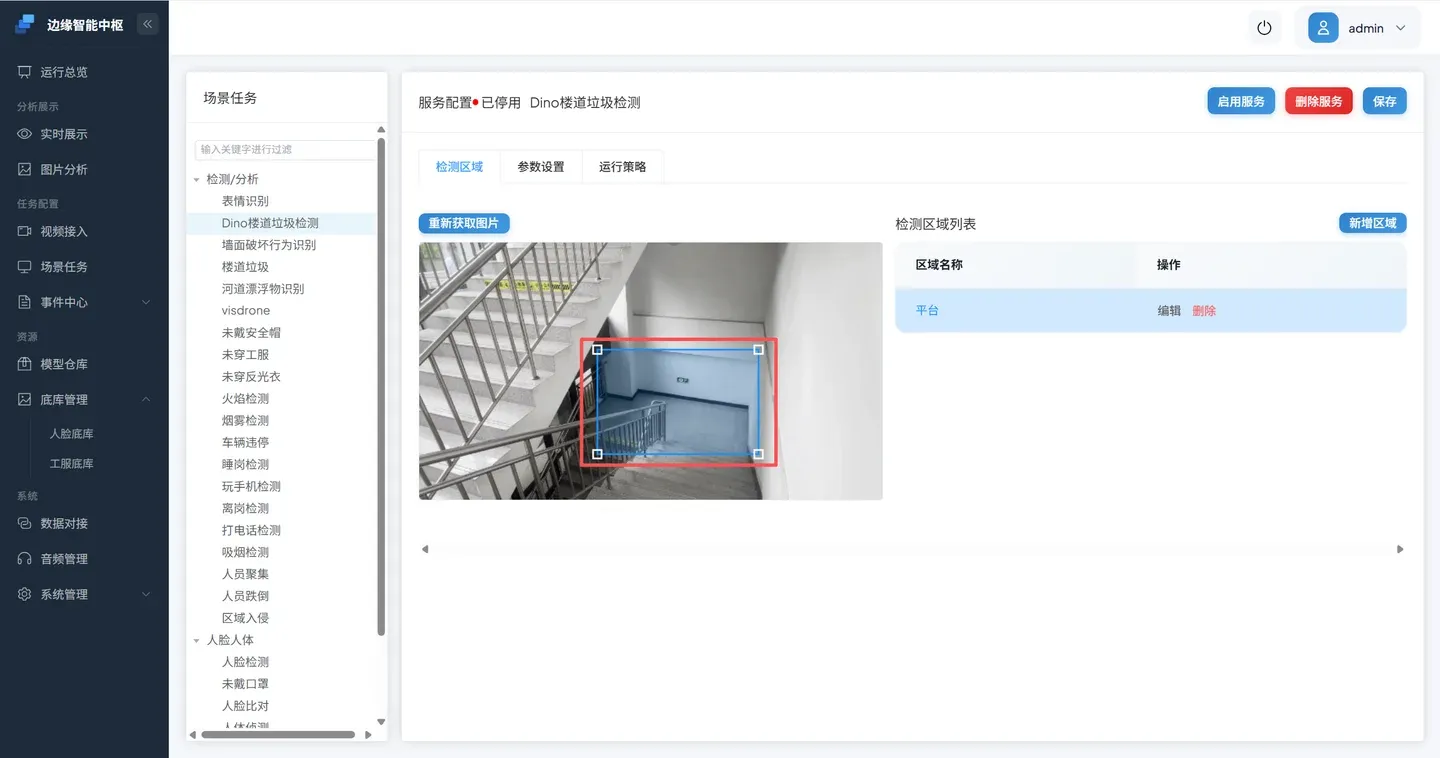
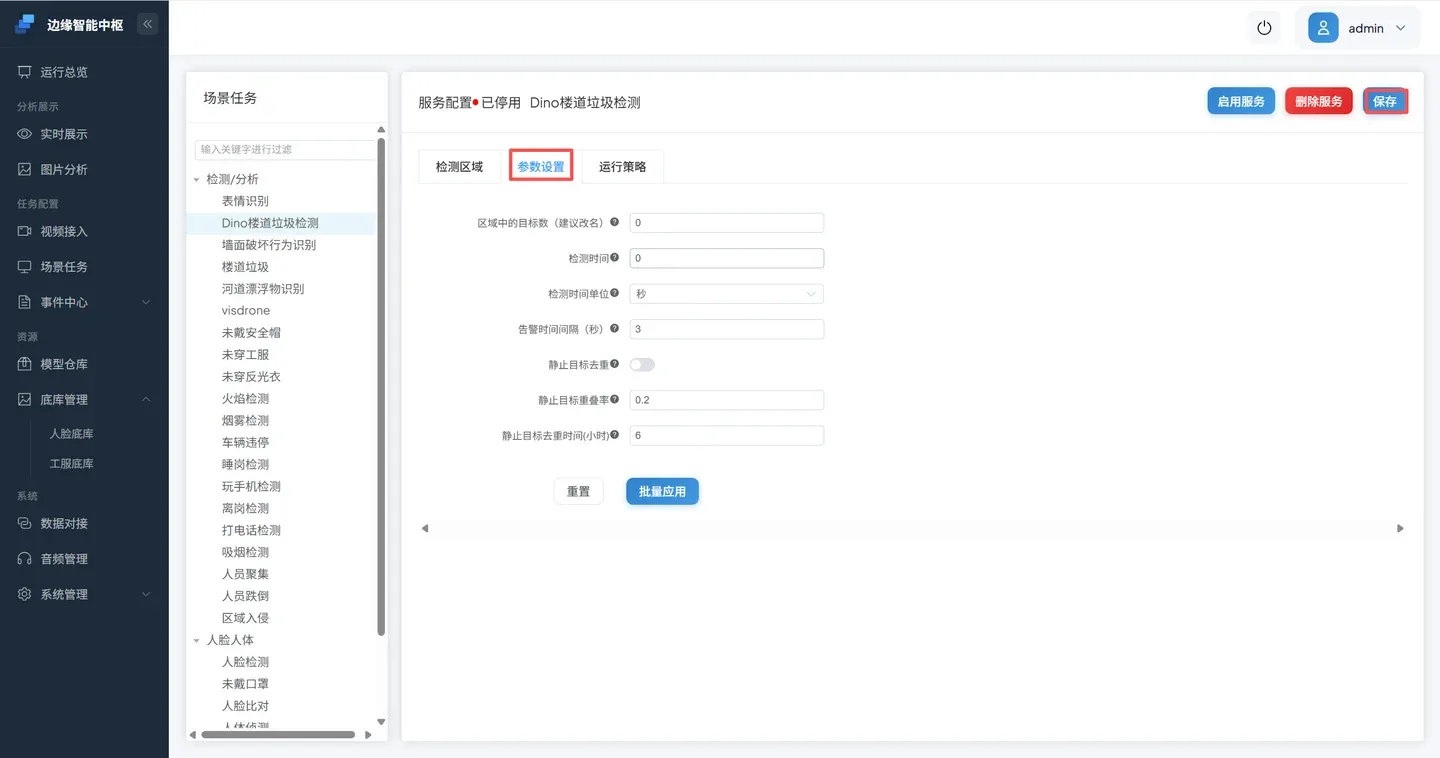
- 参数设置,保存并启动服务。
3.3 查看效果
进入 实时展示,算法叠加效果,

dino的目标框会有延迟,是正常现象。
检测告警效果

3.4 查看事件上报
进入 事件中心,查看告警。
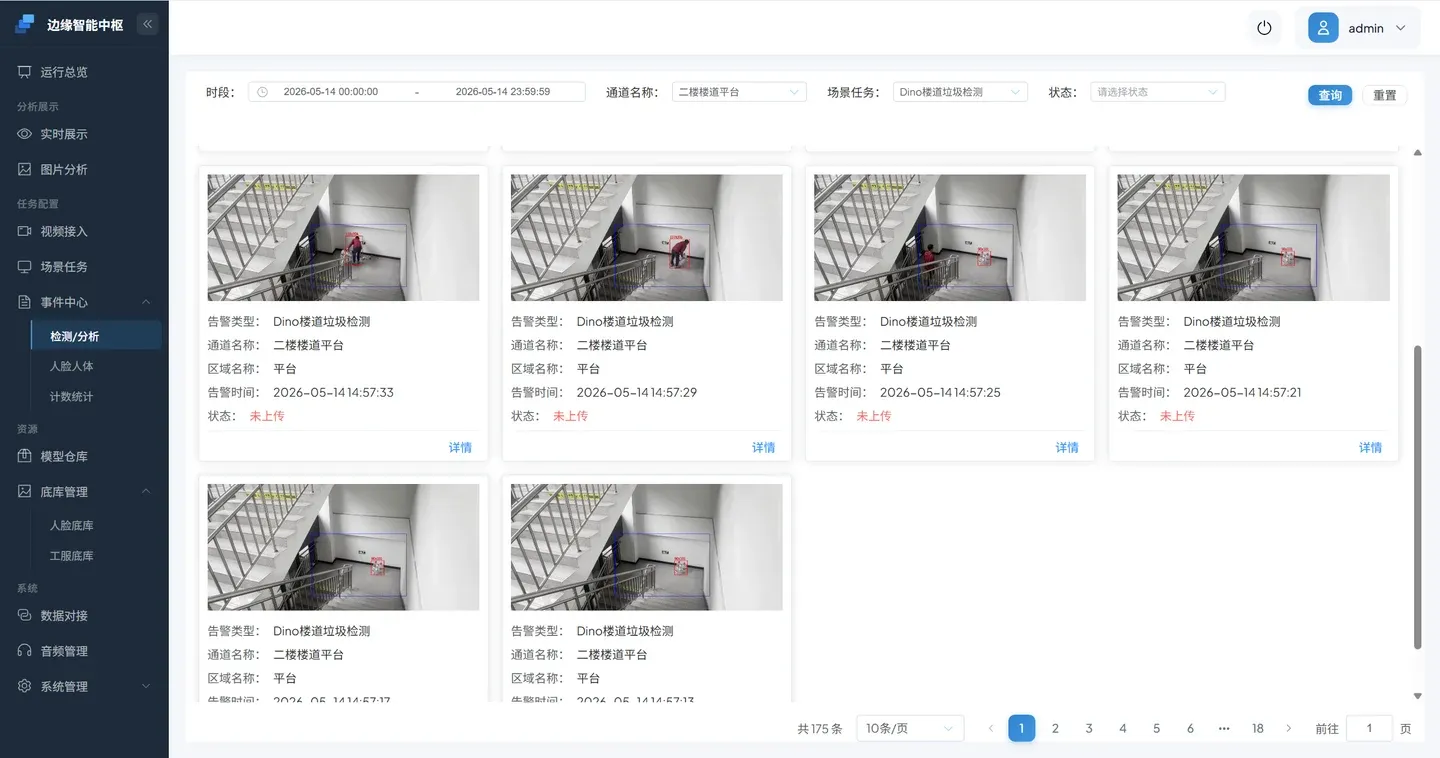
到此 DINO开发目标检测 的使用流程结束。
3.5 DINO 常用提示词速查
| 中文 | 英文提示词 | 备注 |
|---|---|---|
| 人 | person | |
| 车 | car / vehicle | vehicle 范围更广 |
| 垃圾 | garbage / trash | |
| 灭火器 | fire extinguisher | |
| 猫 | cat | |
| 狗 | dog | |
| 箱子 | box / package | |
| 椅子 | chair | |
| 烟雾 | smoke | |
| 火焰 | fire / flame |
不确定怎么写时,用通用的英文名词尝试。DINO 支持的类别非常广泛,大多数日常物体都能识别。
选对工具:CV 小模型 / VLM / DINO 怎么选?
学完本册后,您已经掌握了系统提供的全部三种 AI 分析能力。面对一个新的检测需求时,按以下路径判断该使用哪一种:
您的需求是什么?
│
├─ 第二册的 18 条内置算法里有对应场景吗?
│ └─ ✅ 有 → 直接使用 CV 小模型(最成熟、最快、支持多路并发)
│
├─ 内置算法没有覆盖,我需要的是——
│ │
│ ├─ 判断状态(有/没有、是/否、开/关)
│ │ └─ → 使用 VLM,写一个问题
│ │
│ ├─ 找到目标在哪里(要画检测框)
│ │ └─ → 使用 DINO,写一个目标名称
│ │
│ └─ 需要实时 + 精确 + 大并发
│ └─ → 需要定制训练模型(请提前联系我们)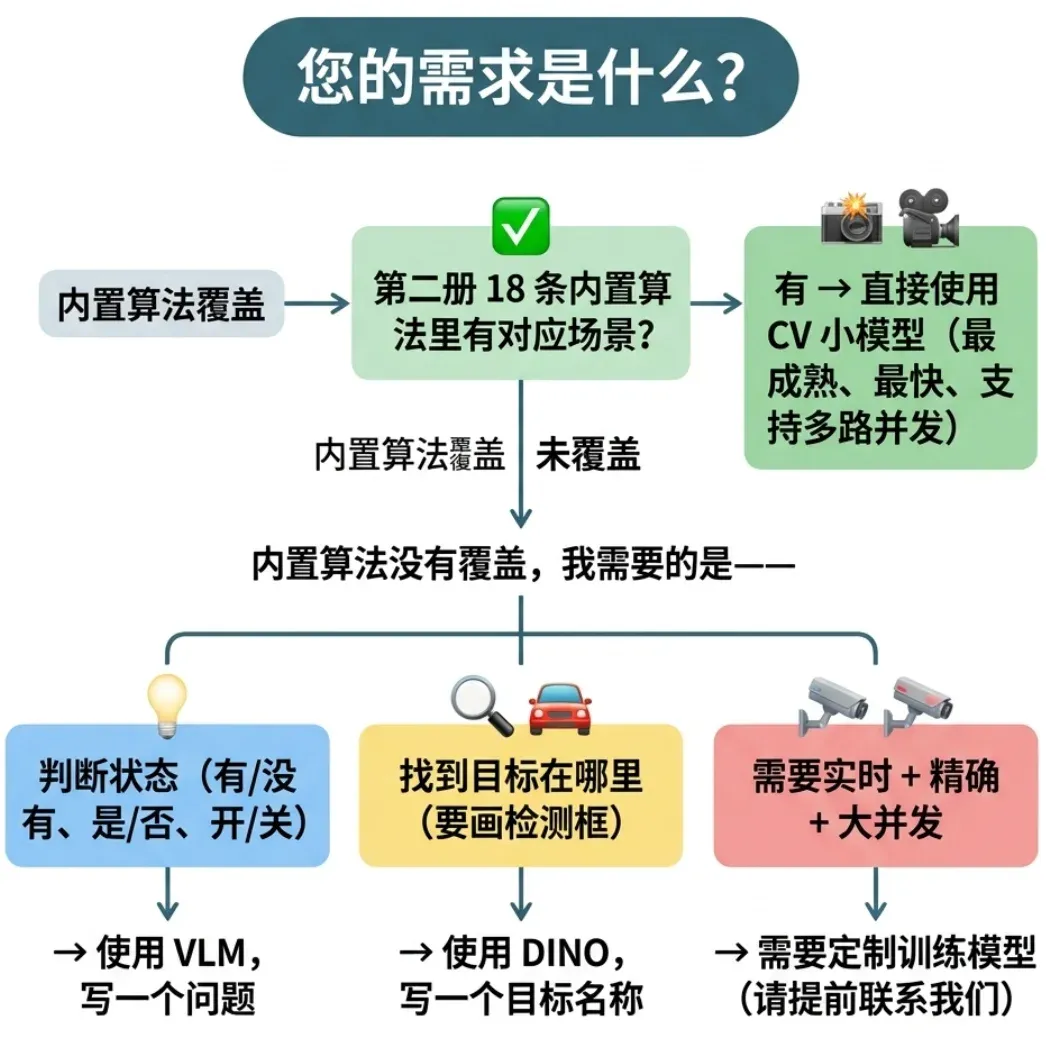
完整对比:
| CV 小模型(第二册) | VLM(本册) | DINO(本册) | |
|---|---|---|---|
| 规则来源 | 训练好的固定模型 | 您写的一个问题 | 您写的一个目标名称 |
| 输出 | 检测框 | YES / NO | 检测框 |
| 速度 | 实时(25fps) | ~2-3 秒/帧 | ~1-2 秒/帧 |
| 并发 | 16 路 | 单路串行 | 单路串行 |
| 切换场景 | 换模型 | 改一句话 | 改一个词 |
| 适合场景 | 主流高频场景 | 长尾状态判断 | 长尾目标检测 |
| 画面显示 | 实时检测框 | 告警面板 | 检测框(较慢) |
| 告警面板 | 检测目标 + 置信度 | YES/NO 判定结果 | 检测目标 + 置信度 |
| 场景任务性能统计 | 叠加在画面上(Decode / OSD / Encoder 低延迟) | 不在画面上 | 叠加在画面上(Decode / OSD / Encoder 高延迟) |
💡 VLM 和 DINO 可以看作 CV 小模型的"万能补充"。您的系统首先用 18 个成熟场景任务 覆盖主流场景,对于覆盖不到的长尾需求,用 VLM 和 DINO 即时补位——无需等待模型训练,当天就能上线。
附录:
DINO 提示词规则
| # | 规则 | 说明 |
|---|---|---|
| 1 | 使用英文名词 | 当前版本对英文支持更稳定 |
| 2 | 用英文句号分隔多个目标 | 如 "person.garbage.fire extinguisher" |
| 3 | 词语尽量具体 | "fire extinguisher" 优于 "red thing" |
VLM 参考场景模板
| 场景 | 参考 Prompt | 输出 | ROI 建议 |
|---|---|---|---|
| 垃圾桶满溢 | "垃圾桶是否已满或溢出?" | YES / NO | 框选垃圾桶位置 |
| 消防柜门状态 | "消防器材柜的门是否关闭?" | YES / NO | 框选柜门区域 |
| 门禁状态 | "门是否处于开启状态?" | YES / NO | 框选门所在区域 |
| 设备指示灯 | "设备指示灯是什么颜色?" | RED / GREEN / YELLOW | 框选指示灯位置 |
| 通道堵塞 | "消防通道是否被杂物堵塞?" | YES / NO | 框选通道地面 |
| 工位状态 | "该工位上是否有人在工作?" | YES / NO | 框选工位区域 |
新场景验证 Checklist
无论使用 VLM 还是 DINO,每个新场景上线前请确认:
- [ ] 用 图片测试 验证过至少 3 张正样本(应该触发告警的图)
- [ ] 用 图片测试 验证过至少 3 张负样本(不应该触发告警的图)
- [ ] 同一张图连续测试 3 次,结果一致(稳定性)
- [ ] ROI 已框选到具体关注区域,排除了无关背景
- [ ] 取帧频率已根据场景需求设置合理值
下一步
| 目标 | 阅读 |
|---|---|
| 查询参数含义、获取排障帮助 | → 参考手册 |
| 了解模型植入能力(将自研模型部署到设备) | → 参考手册 - 模型植入概述 |