卷五:模型移植
阅读时长:30-45 分钟 目标:学会将第三方模型转换、上传并接入系统,完成一次“模型移植 + 场景任务 接入 + 效果验证”的完整闭环 前提:已完成 CosmoEdge 场景任务 编排 ,理解基本的 场景任务 编排 需要额外环境:一台安装了 Docker 的电脑,用于模型转换
CosmoEdge 场景任务 编排 解决的是“怎么组织已有能力”。本卷解决的是“怎么把新的能力带进来”。也就是说:
- **CosmoEdge 场景任务 编排 **教您编排
- CosmoEdge 第三方模型移植 教您引入第三方模型
学完本卷后,您将具备以下能力:
- 将 ONNX 模型转换为设备可运行的
bmodel - 将模型上传到 CosmoEdge
- 配置模型元数据并验证模型是否可用
- 将第三方模型接入新的 场景任务
本卷学习路径
准备模型
↓
Docker 中完成转换
↓
上传到系统并补全元数据
↓
图片验证
↓
接入 场景任务 并做端到端测试第一章:准备第三方模型
本卷使用一个公开可获取的 VisDrone 检测模型 作为示例。
选择它有三个原因:
- 公开、可复用,适合教程示例
- 是标准目标检测任务,容易验证
- 类别和系统内置场景不同,能证明平台不只支持内置模型
1.1 支持的输入格式
| 格式 | 说明 |
|---|---|
| ONNX | 推荐,兼容性最好 |
PyTorch .pt | 需先自行导出为 ONNX |
TensorFlow .pb | 需先自行导出为 ONNX |
建议
首次移植优先选 ONNX。 这样能把问题集中在“模型转换和接入”本身,而不是框架导出差异。
1.2 本卷示例文件
请准备一个 ONNX 模型文件,例如:
visdrone_yolov8s.onnx并放在本地目录中,例如:
/home/user/models/注意
如果后续您替换成自己的模型,下面命令里的文件名、输入尺寸、输出名都要跟着一起改。
第二章:Docker 环境准备
模型转换需要使用算能官方提供的 Docker 镜像。
2.1 安装 Docker
| 操作系统 | 安装方式 |
|---|---|
| Ubuntu / Debian | sudo apt-get install docker.io |
| CentOS | sudo yum install docker |
| Windows | 安装Docker Desktop |
安装后验证:
docker --version
## 预期输出:Docker version 2x.x.x
将用户USER添加到docker用户组
sudo gpasswd -a USER docker替换 USER 为自己的普通用户
更新用户组
newgrp docker
2.2 拉取镜像
下载镜像压缩包
wget https://sophon-file.sophon.cn/sophon-prod-s3/drive/24/06/14/12/sophgo-tpuc_dev-v3.2_191a433358ad.tar.gz
导入镜像站点
docker load -i sophgo-tpuc_dev-v3.2_191a433358ad.tar.gz

2.3 常用 Docker 命令速查
| 命令 | 作用 |
|---|---|
docker images | 查看本地镜像 |
docker run -it -v /本地路径:/容器路径 sophgo/tpuc_dev:latest bash | 启动容器并挂载目录 |
exit | 退出容器 |
第三章:模型转换
将 ONNX 模型转换为设备可运行的 bmodel,核心只需要两步:
model_transformmodel_deploy
3.1 启动容器
docker run -it -v /home/user/models:/workspace sophgo/tpuc_dev:v3.2 bash这条命令的作用是:
- 启动官方转换环境
- 把本地模型目录挂载到容器内的
/workspace

3.2 安装转换依赖包
pip install tpu_mlir -i https://mirrors.ustc.edu.cn/pypi/simple/
3.3 步骤一:转换为 MLIR
model_transform \
--model_name visdrone_yolov8s \
--model_def /workspace/visdrone_yolov8s.onnx \
--input_shapes [[1,3,640,640]] \
--pixel_format rgb \
--output_names output0 \
--mlir visdrone.mlir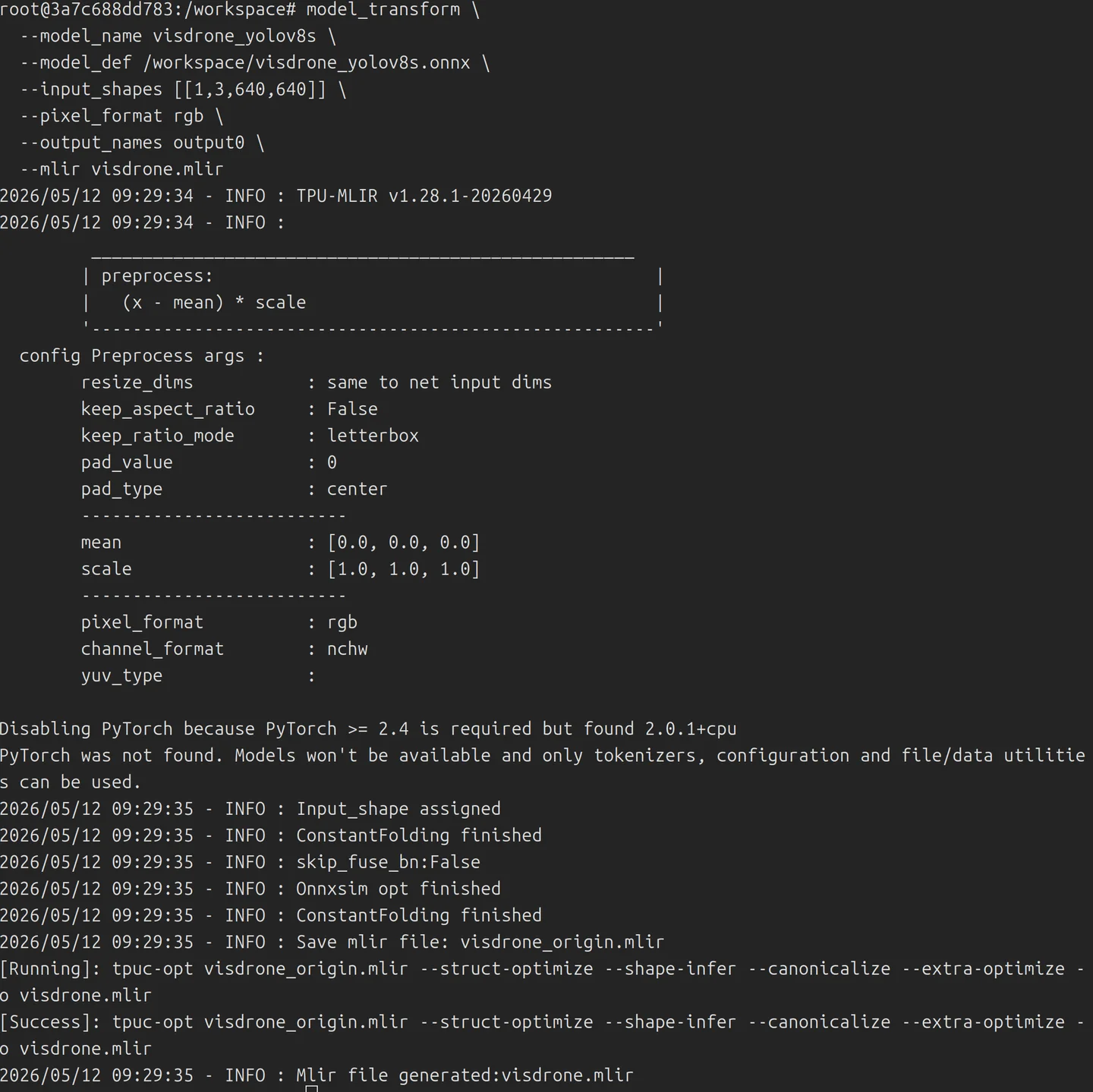

3.4 步骤二:转换为 bmodel
model_deploy \
--mlir visdrone.mlir \
--quantize F16 \
--chip bm1688 \
--model visdrone_yolov8s_f16.bmodel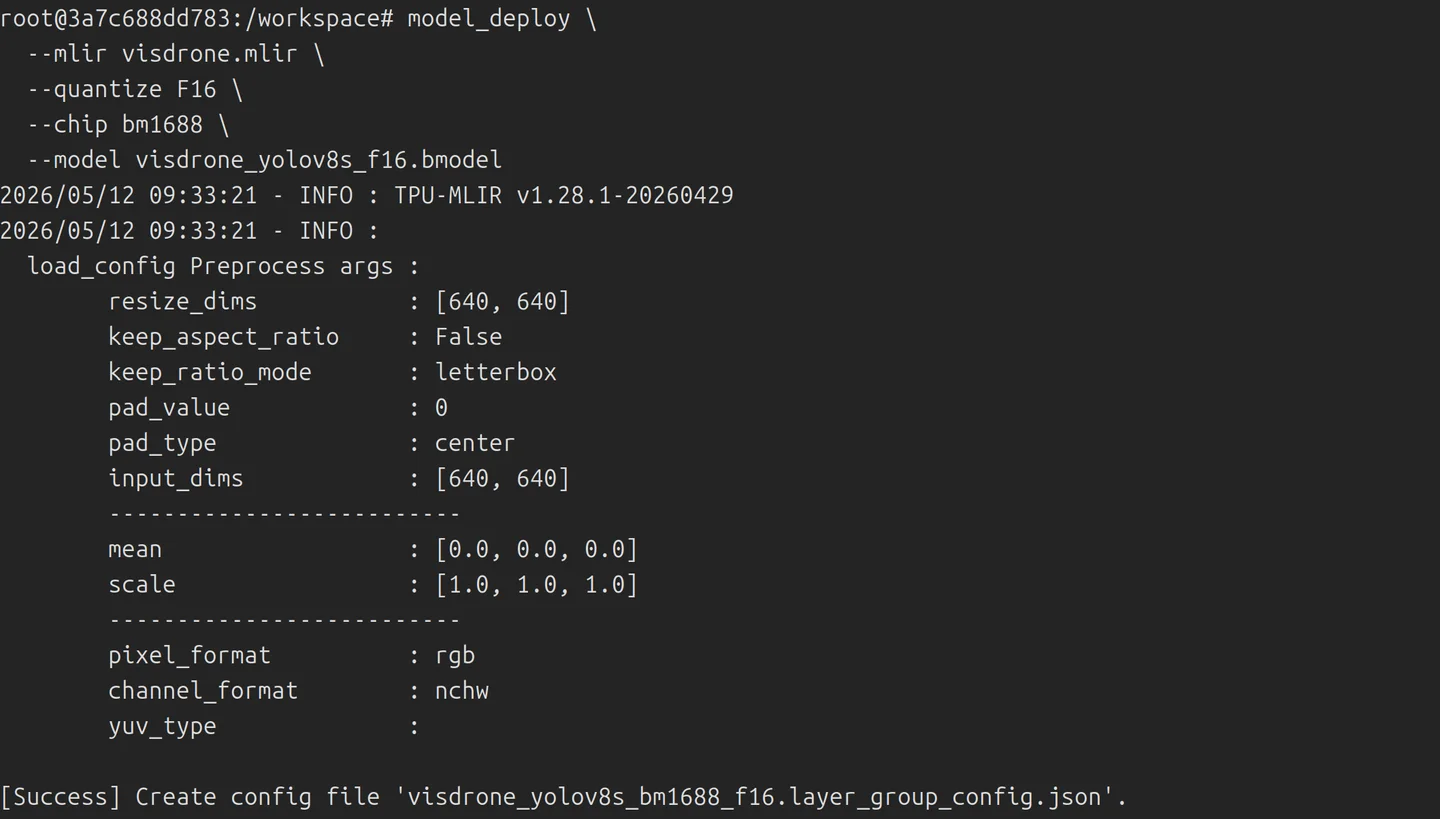
转换完成后,/workspace 目录下会生成:
visdrone_yolov8s_f16.bmodel
3.4 这一步最常见的三个注意点
--input_shapes必须和模型训练/导出时一致--pixel_format要和模型训练时预处理一致--output_names要和模型导出的实际输出名一致
第四章:上传模型到系统
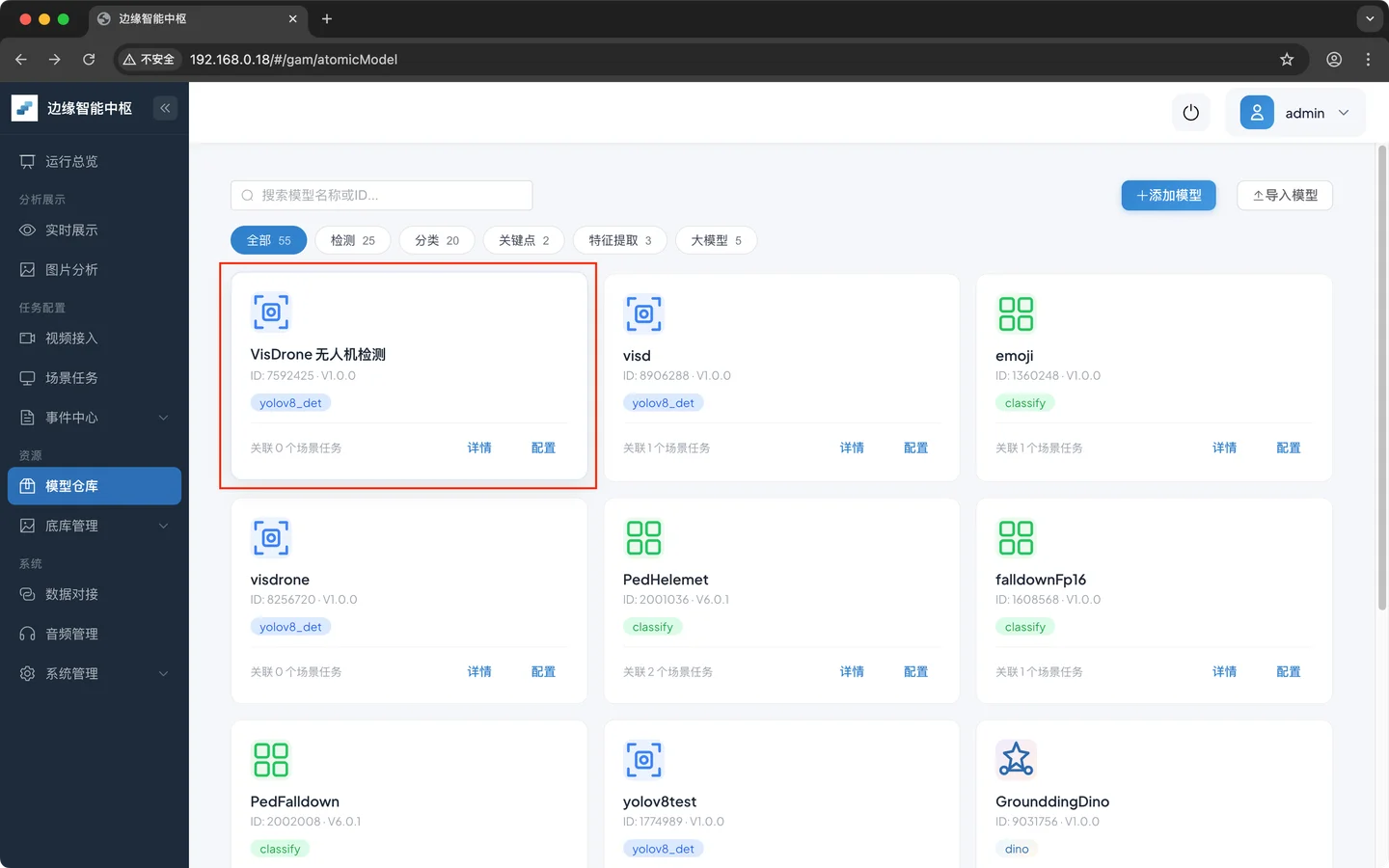
4.1 进入模型仓库
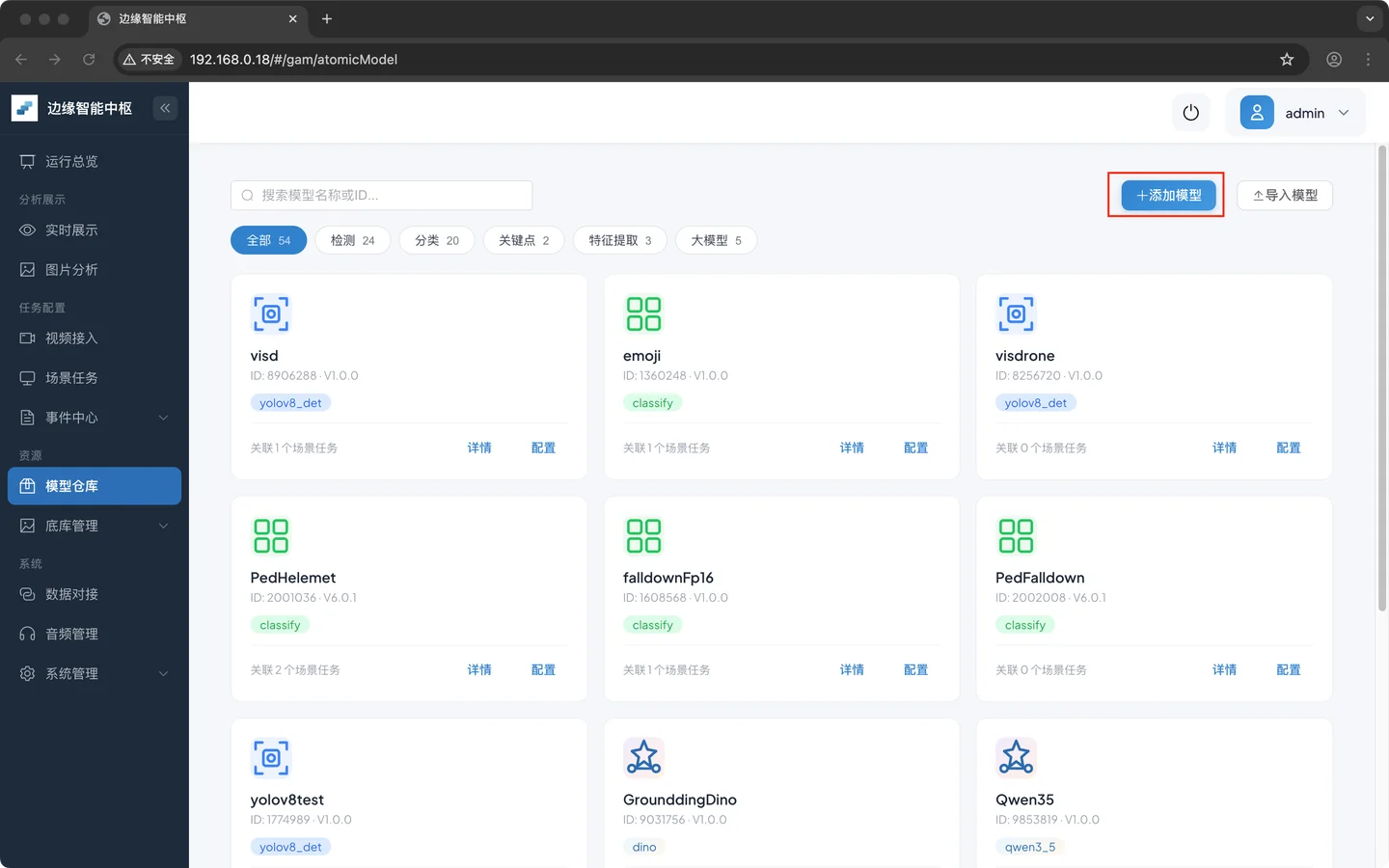
- 进入 模型仓库
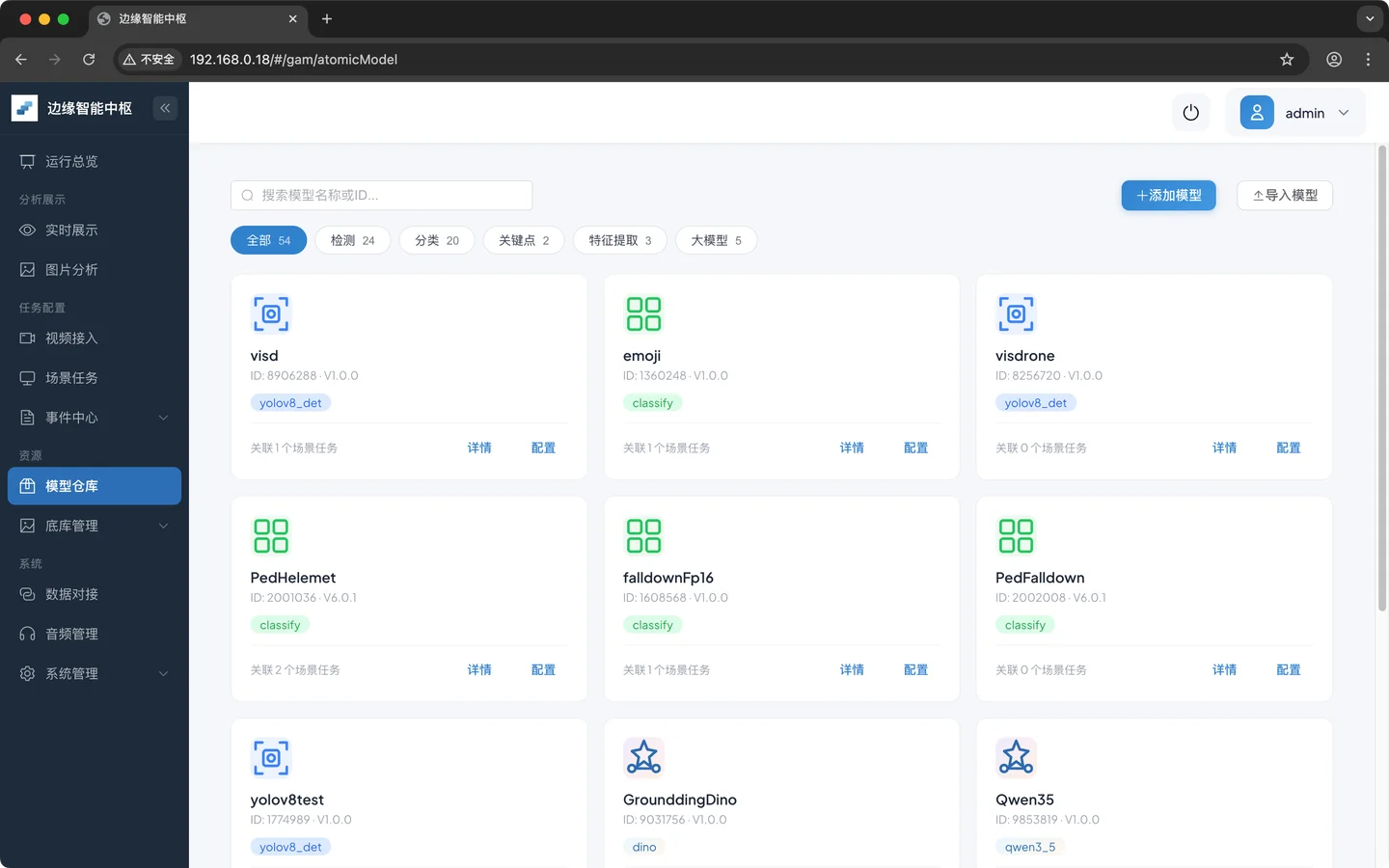
- 点击 上传模型
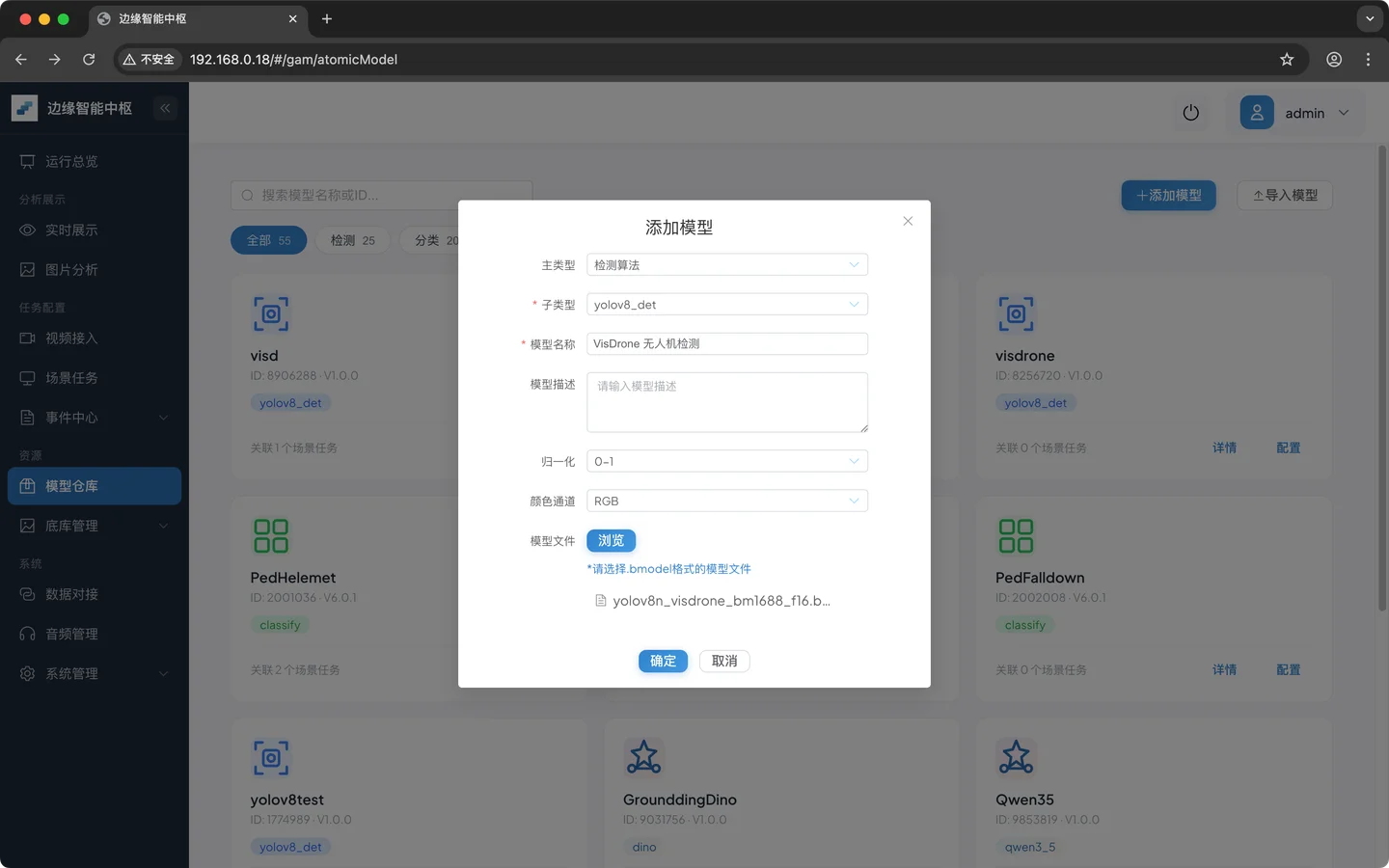
填写模型信息:
| 字段 | 示例值 | 说明 |
|---|---|---|
| 主类型 | 检测算法 | |
| 子类型 | yolov8_det | 上传的模型yolo版本 |
| 模型名称 | VisDrone 无人机检测 | 便于识别 |
| 上传文件 | visdrone_yolov8s_f16.bmodel | 转换得到的模型文件 |
| 归一化 | 0-1 | |
| 颜色通道 | RGB | |
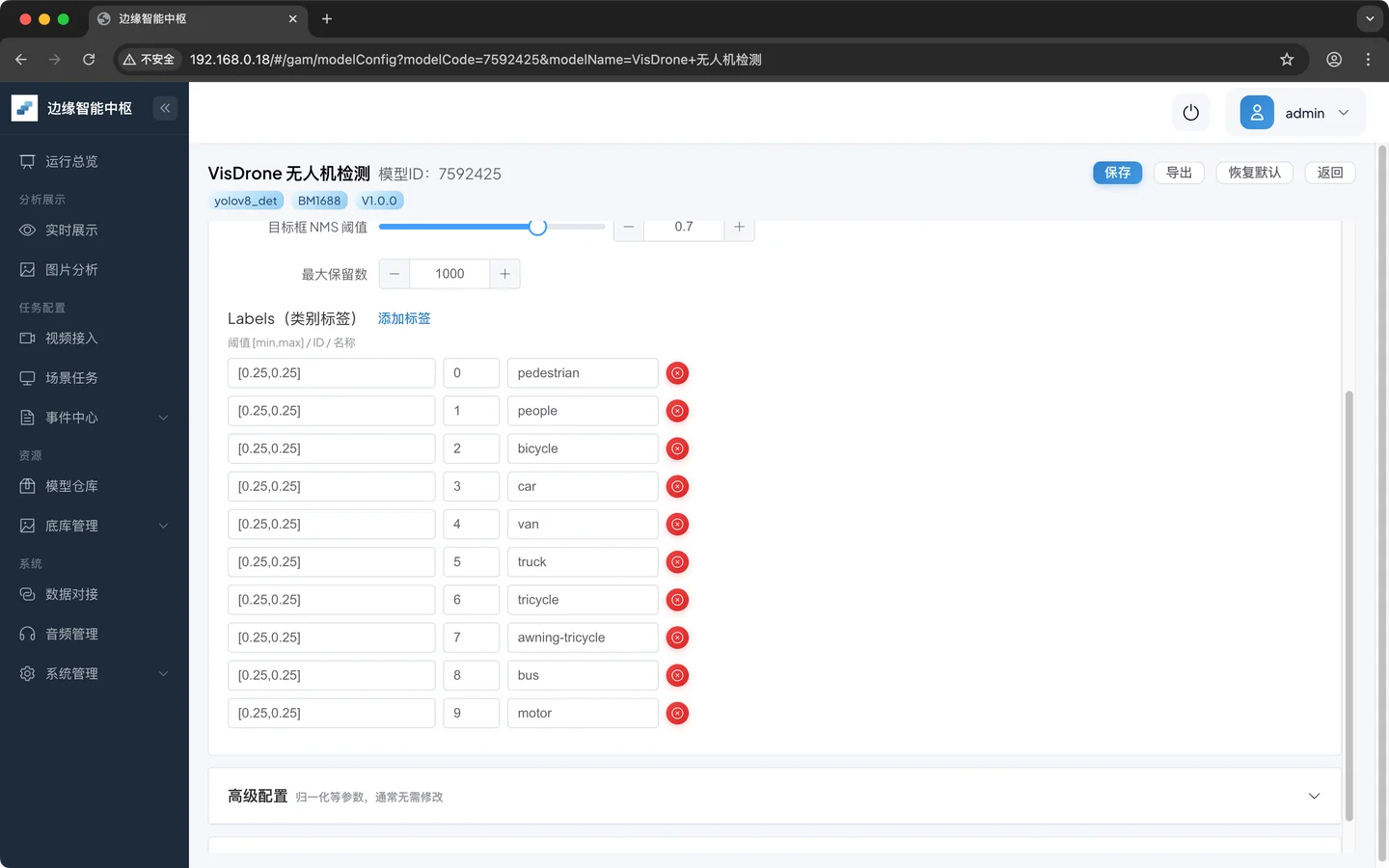
| 类别标签 | pedestrian, people, bicycle, car, van, truck, tricycle, awning-tricycle, bus, motor | 用于类别显示和映射 |
点击 确定 保存该模型
4.2 上传完成后的检查点
上传完成后,确认:
- 模型出现在模型仓库列表中
- 状态正常
- 名称、类型、输入尺寸、标签无明显错误
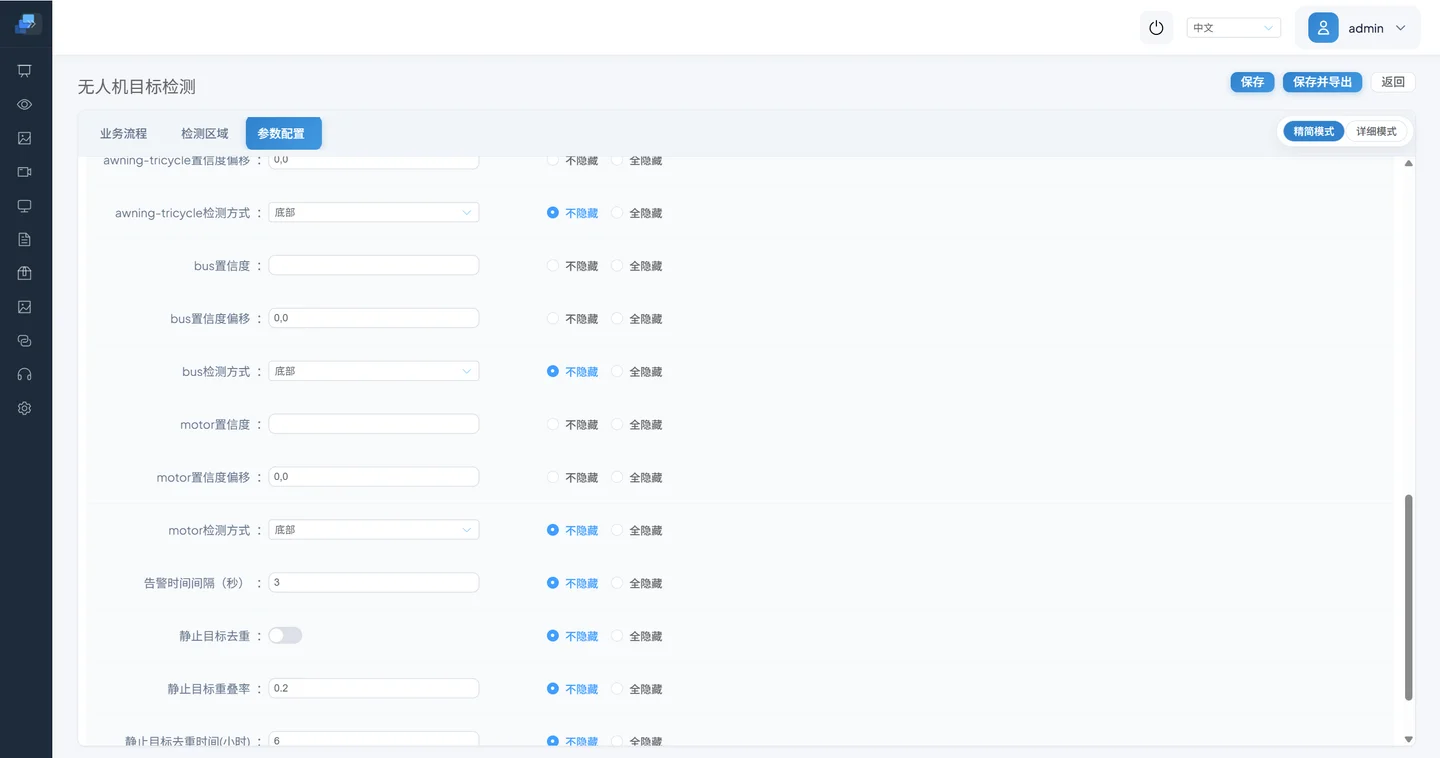
修改配置尺寸、置信度阈值等基础参数
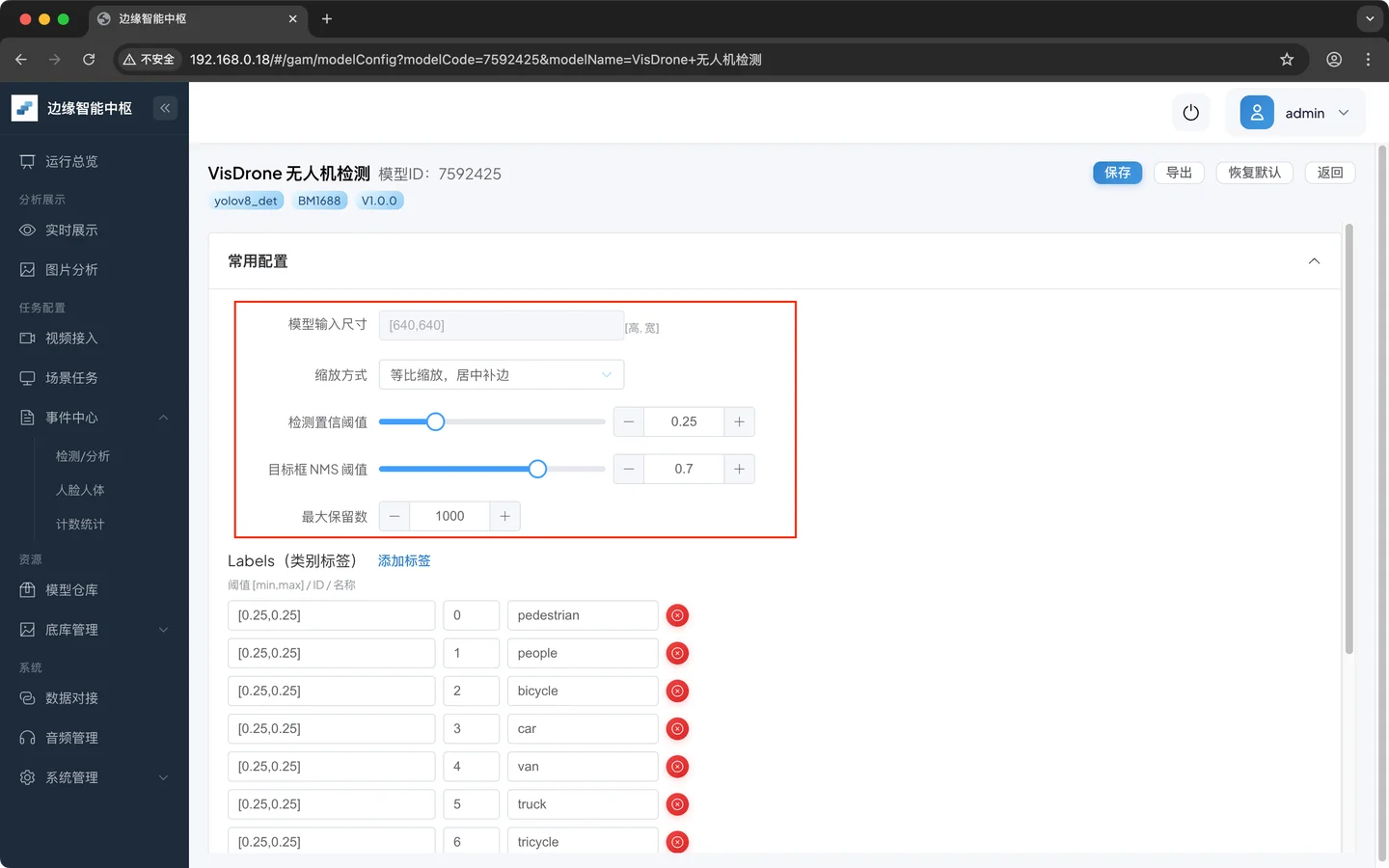
修改配置类别信息
模型的基础信息一定要准确无误,否则出问题排查难度大
第五章:图片验证模型可用性
在把模型接入 场景任务 之前,先做一次轻量验证。
5.1 准备测试图片
准备几张与模型场景接近的图片,例如无人机航拍图。
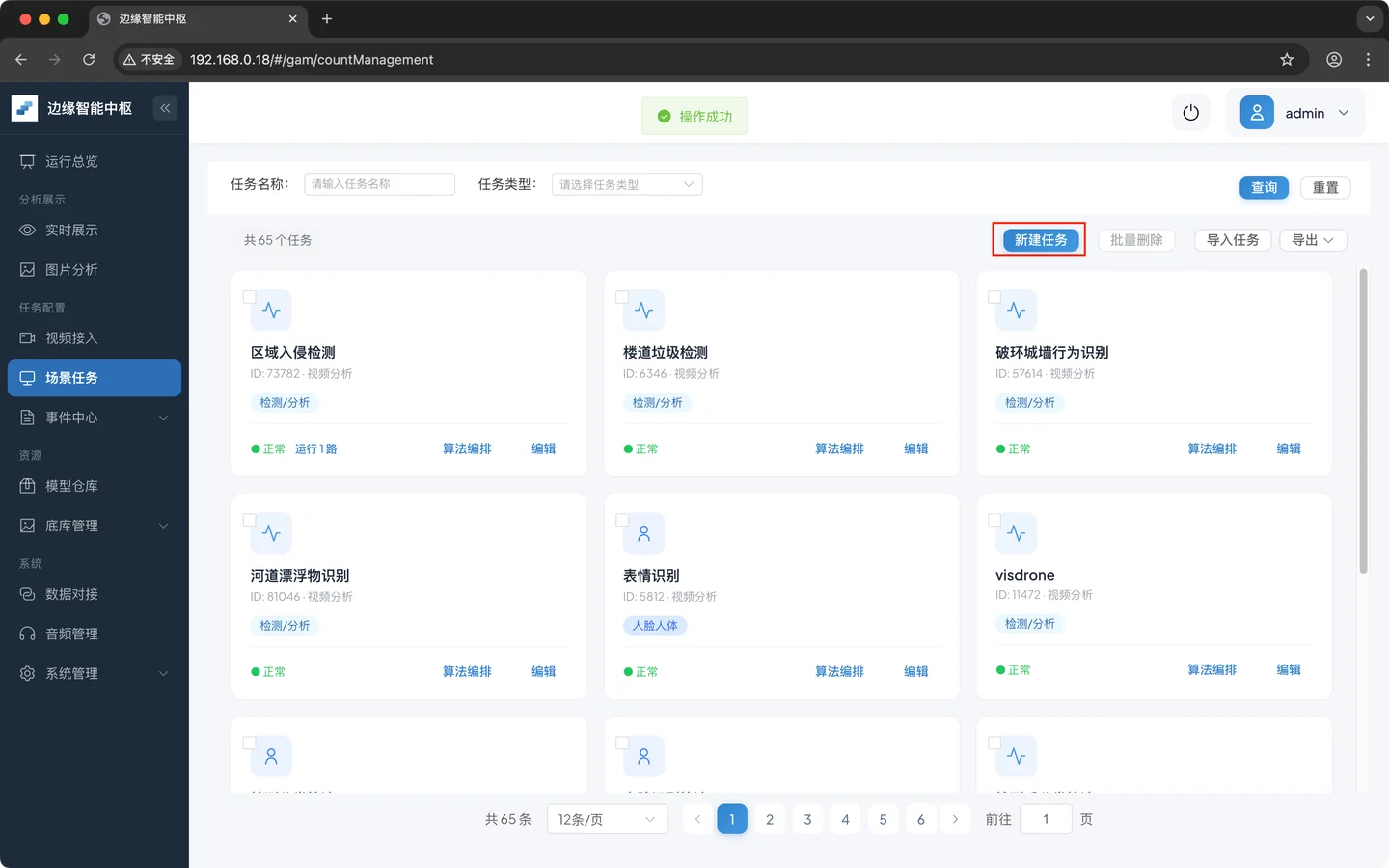
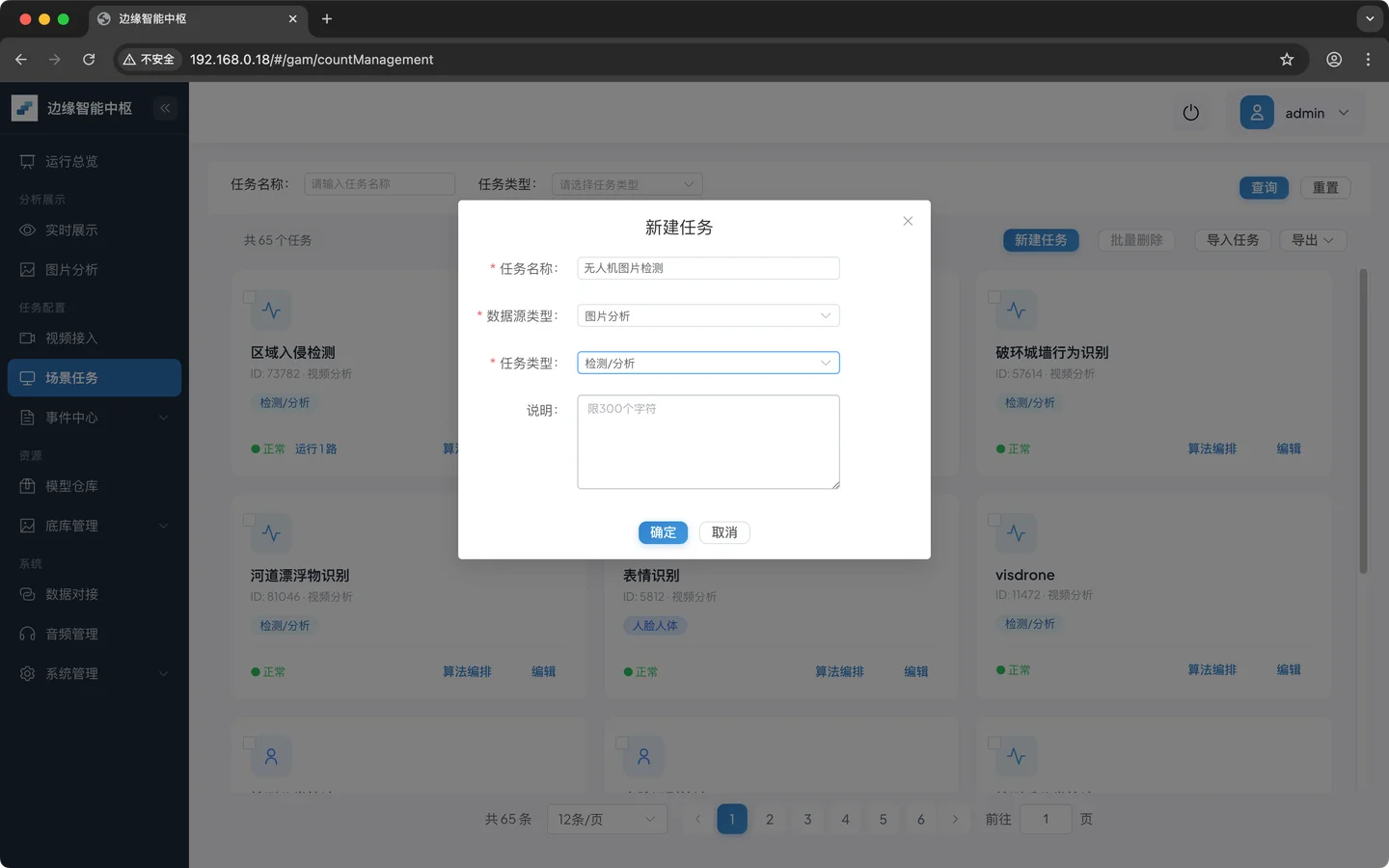
5.2 创建图片验证任务
- 进入 **场景任务, **新建无人机图片检测任务
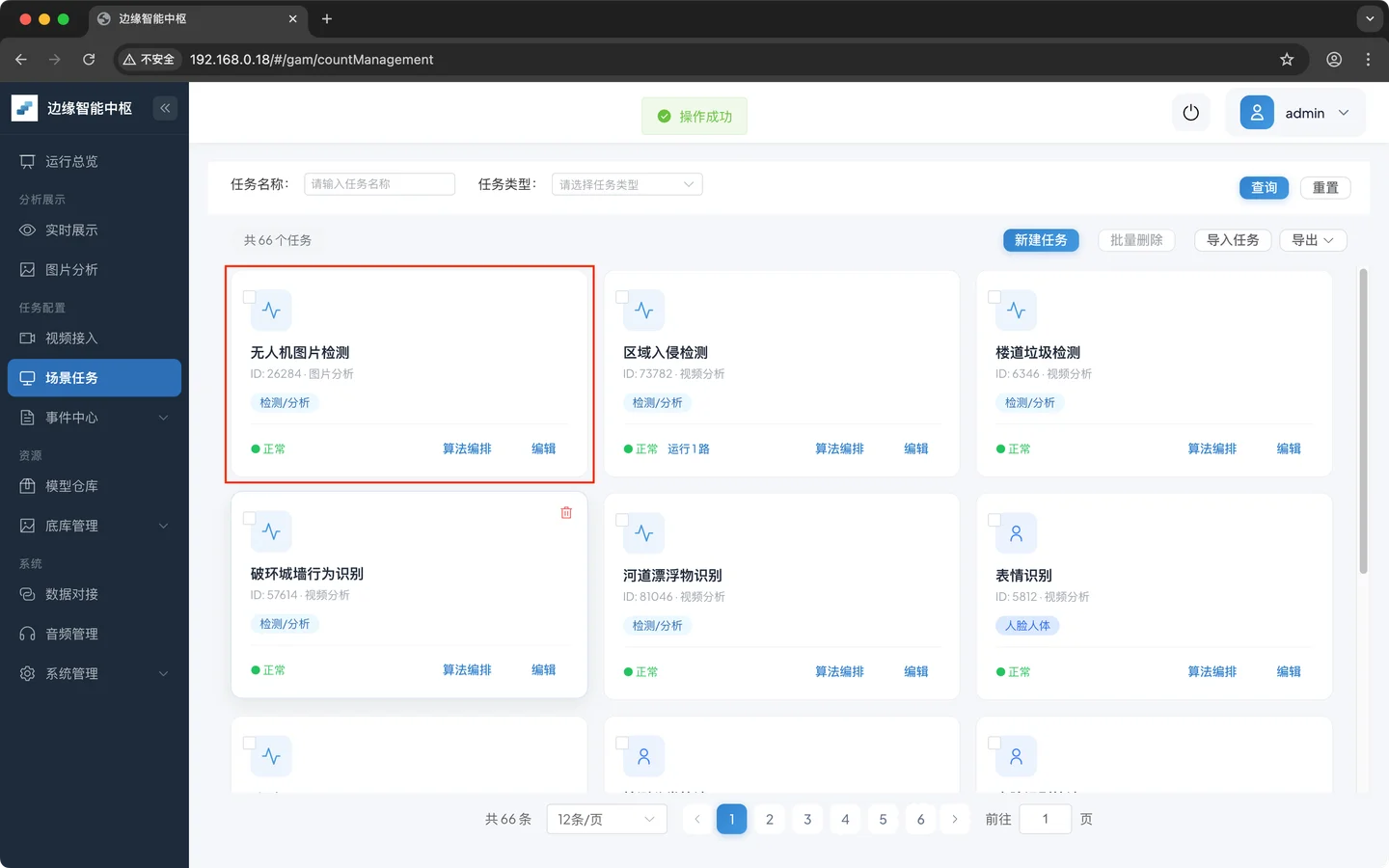
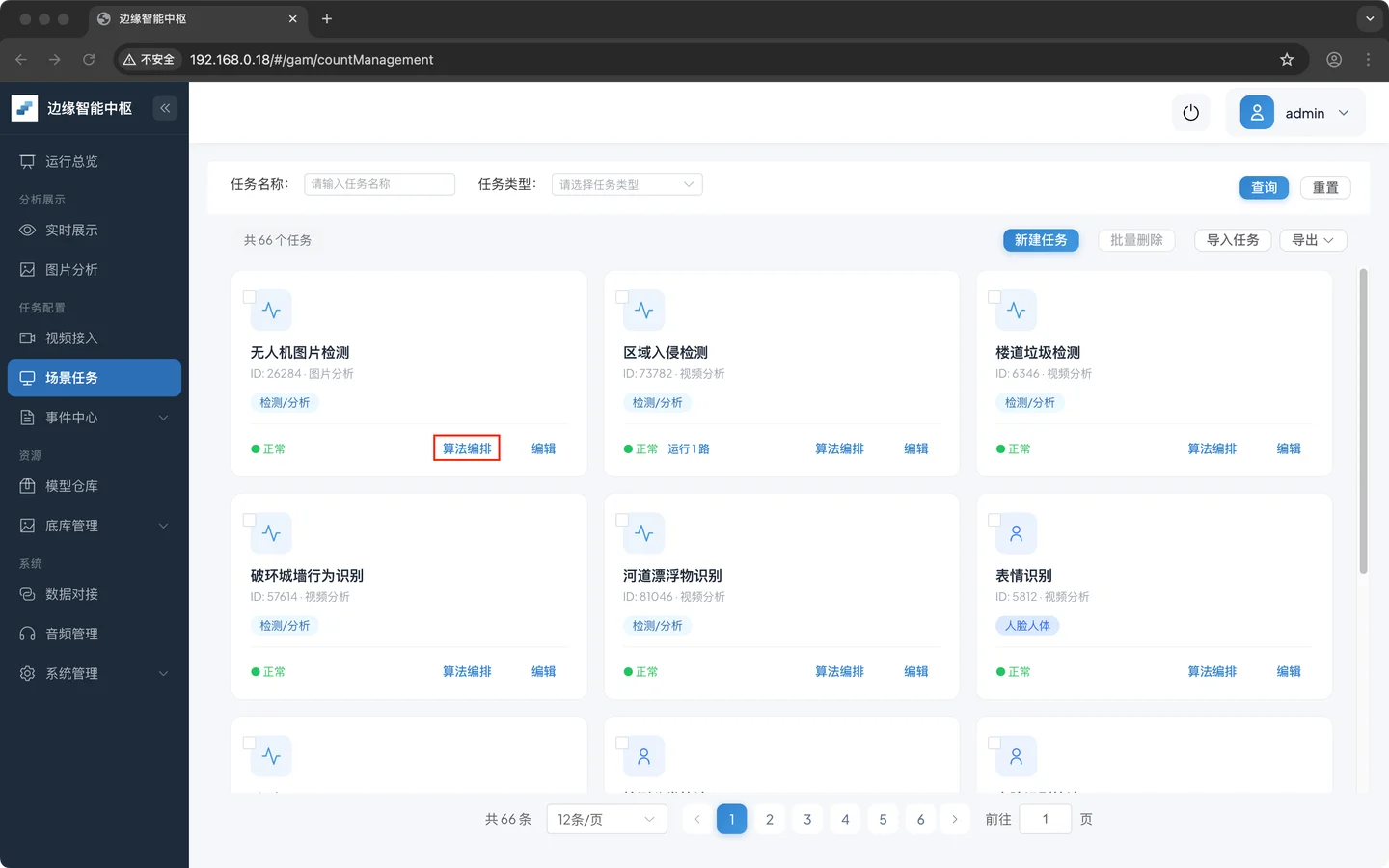
- 创建 **无人机图片检测 **算法编排链路
点击 算法编排 进入编排页面
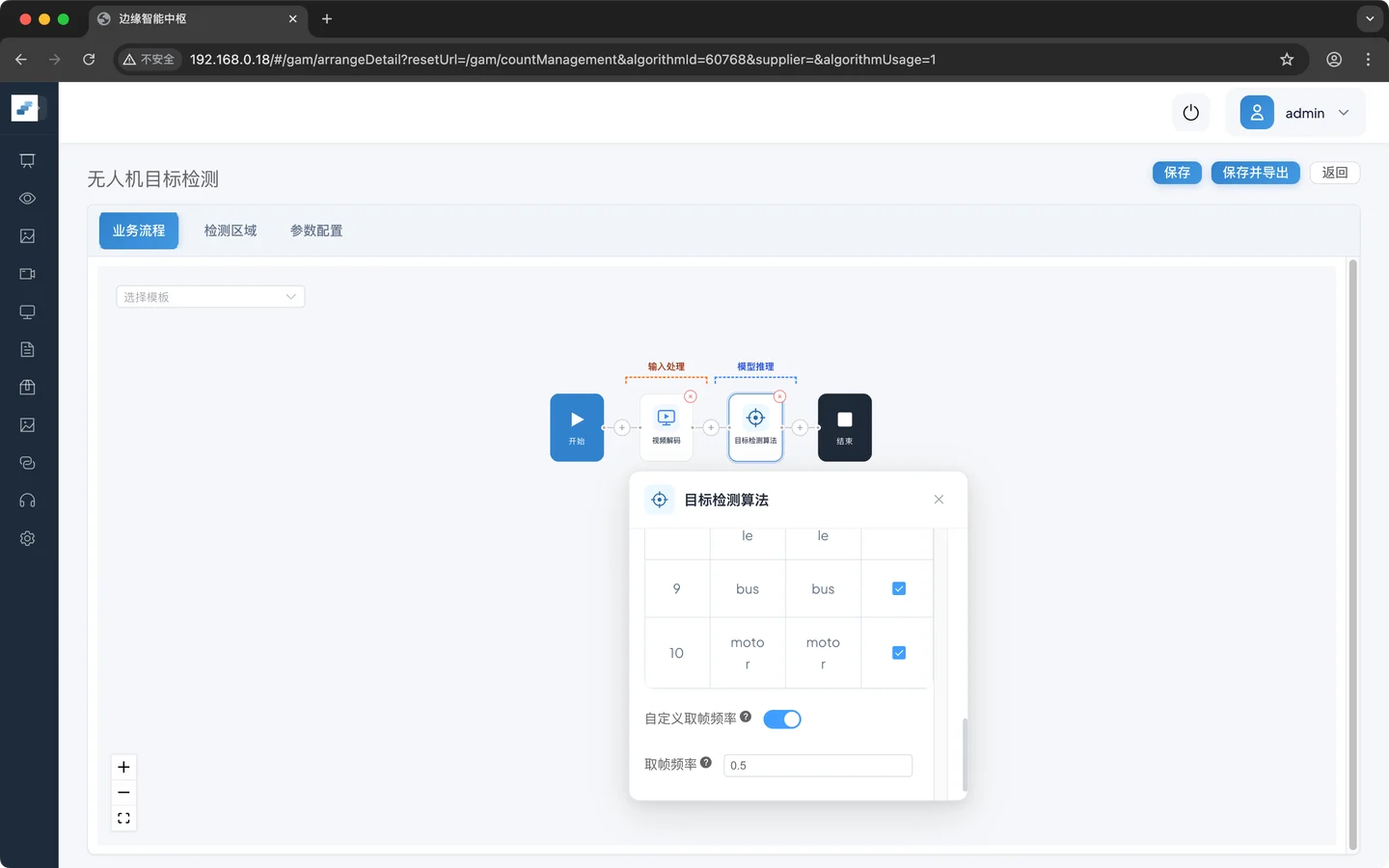
添加 **目标检测算法 **
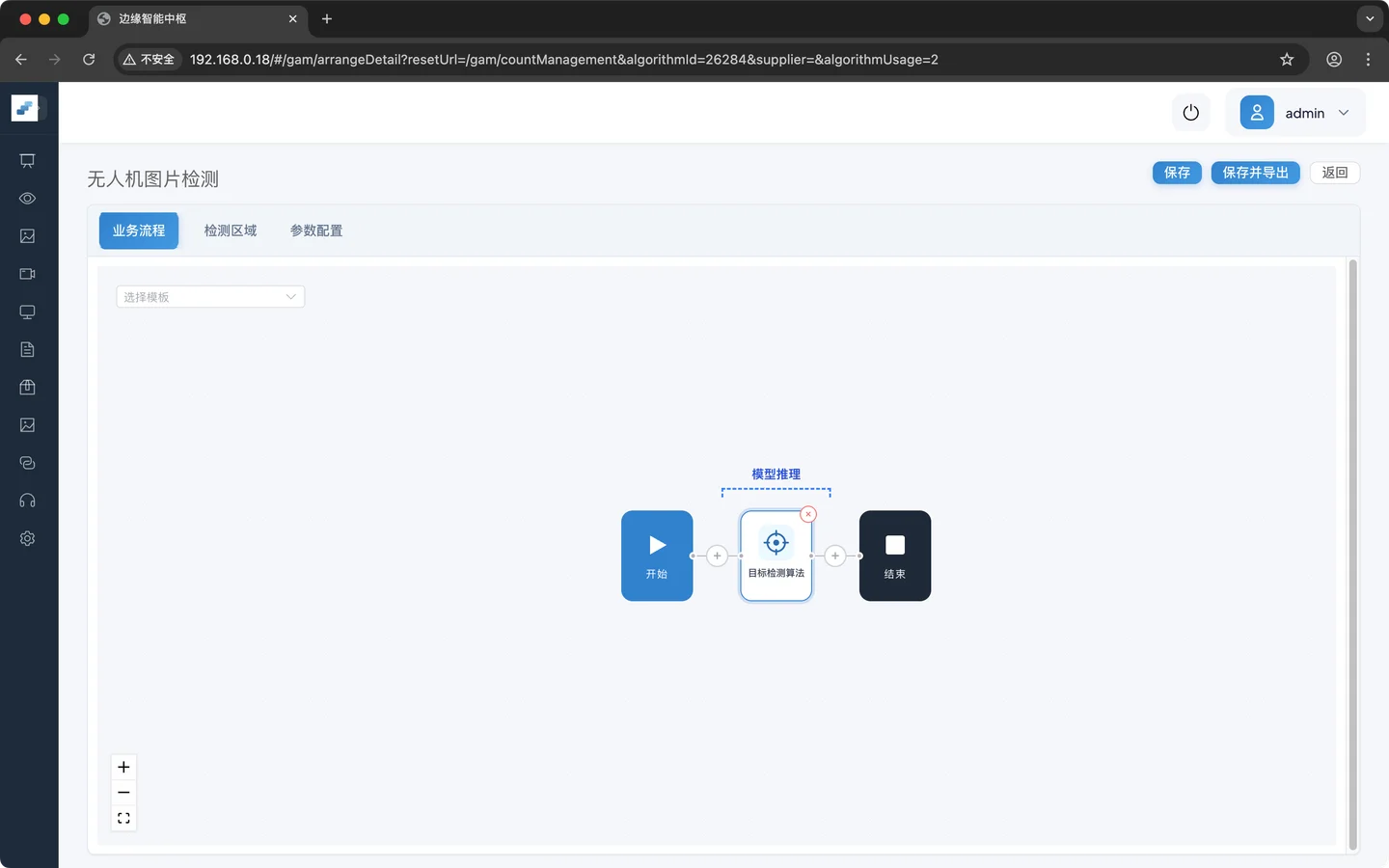
配置 业务逻辑参数
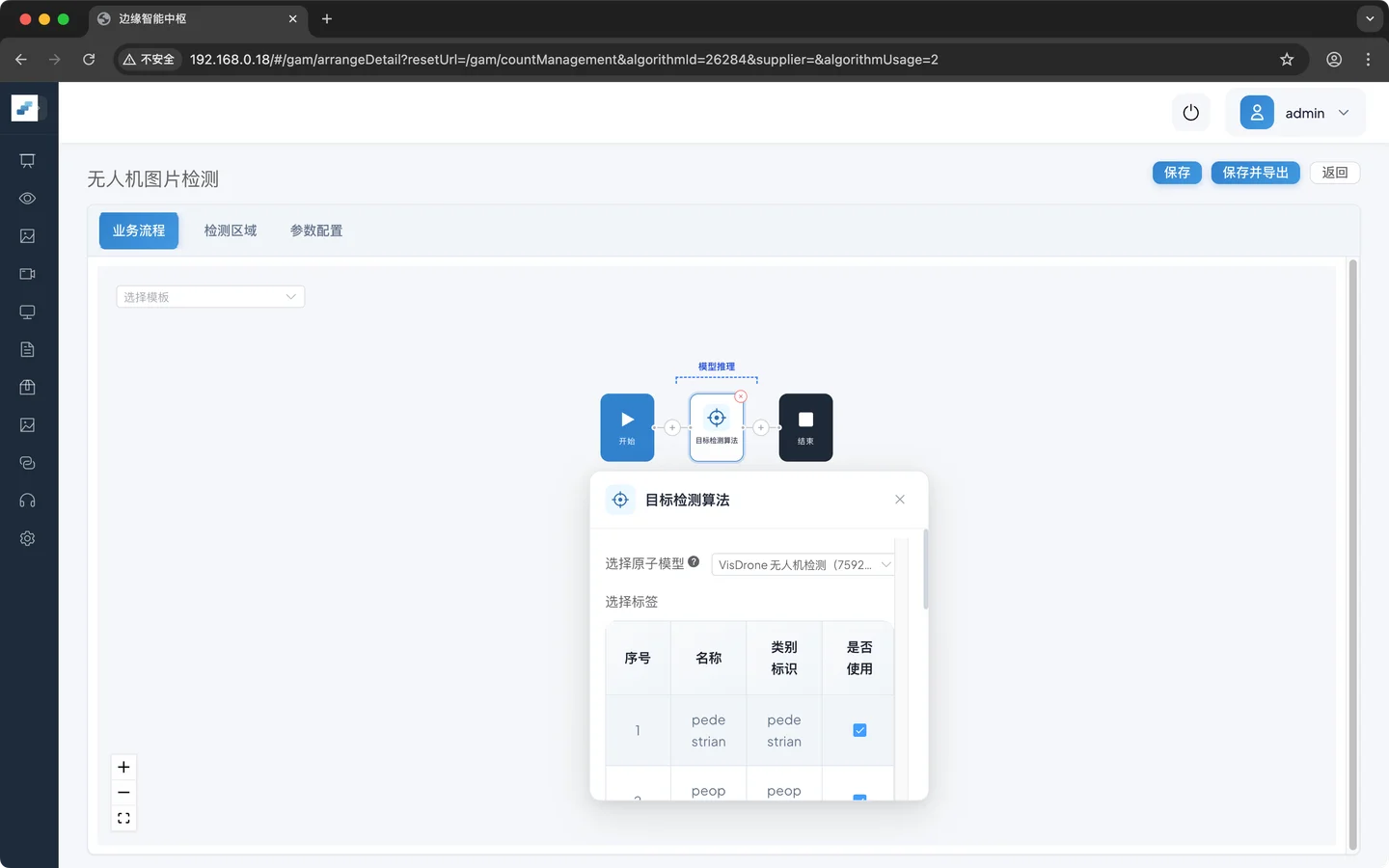
选择原子模型:VisDrone 无人机检测
选择标签:全选
点击 **保存 **将该编排流程保存
5.3 图片分析
- 选择算法 无人机图片检测
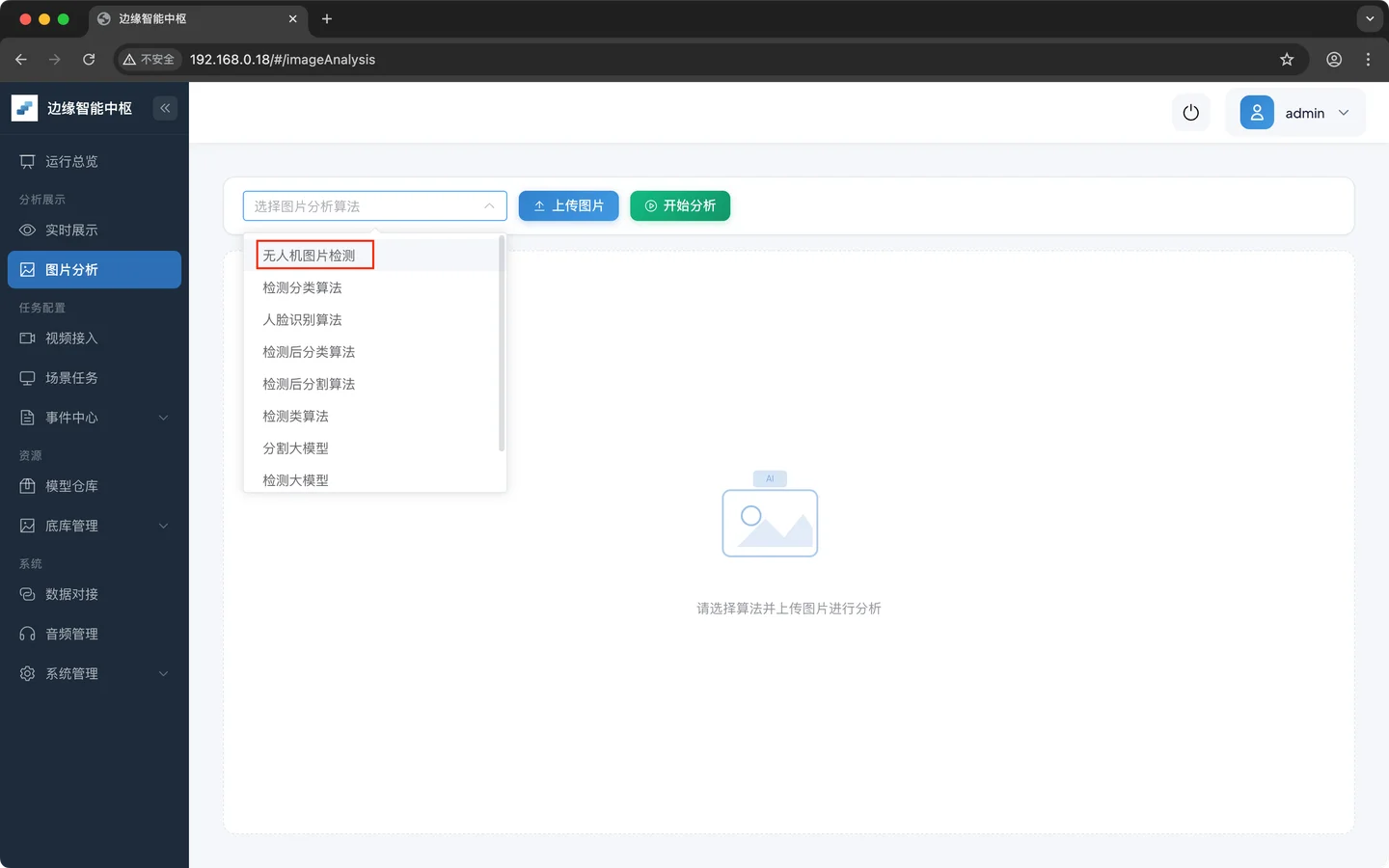
- 上传图片
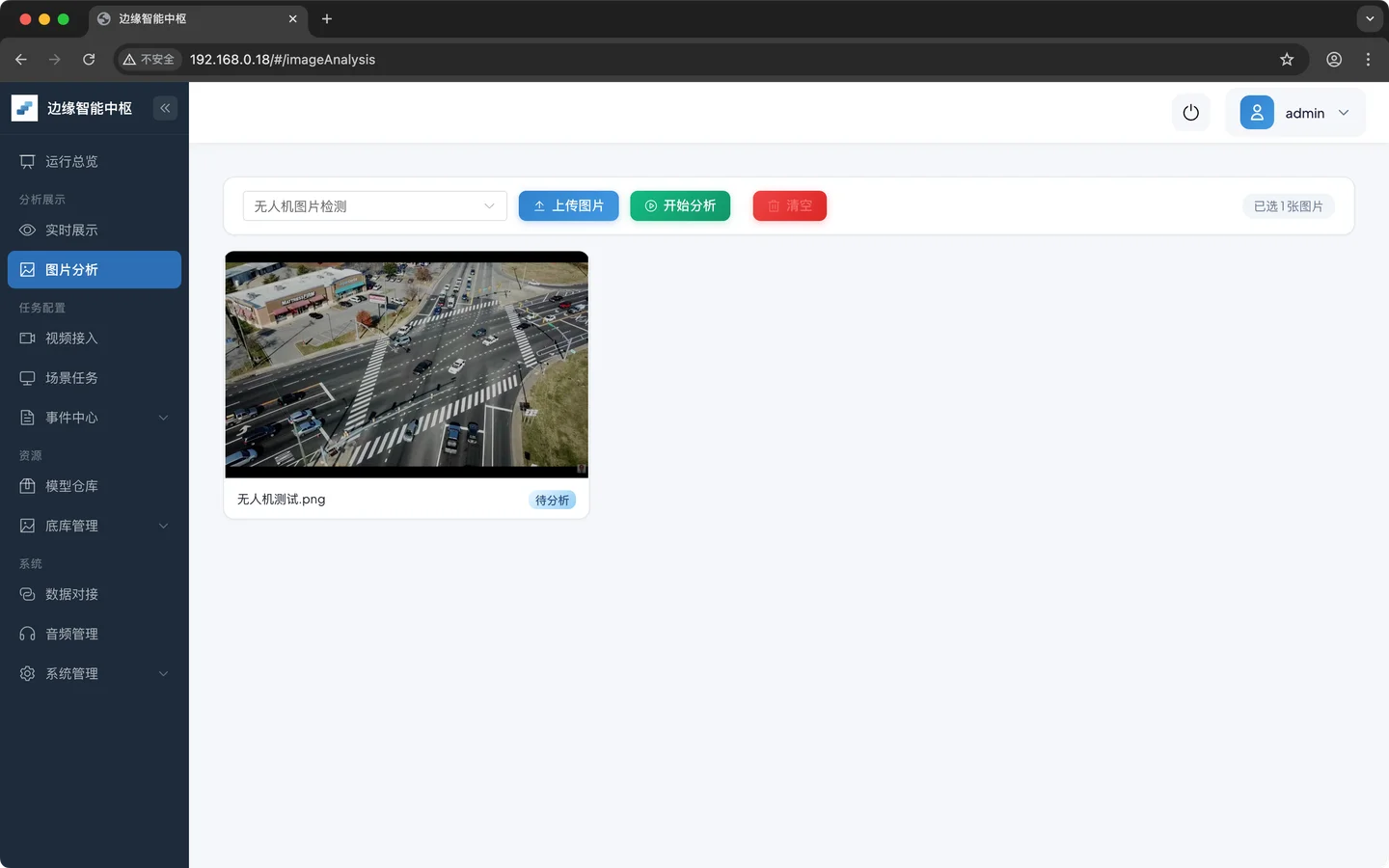
- 点击** 开始分析 **启动测试
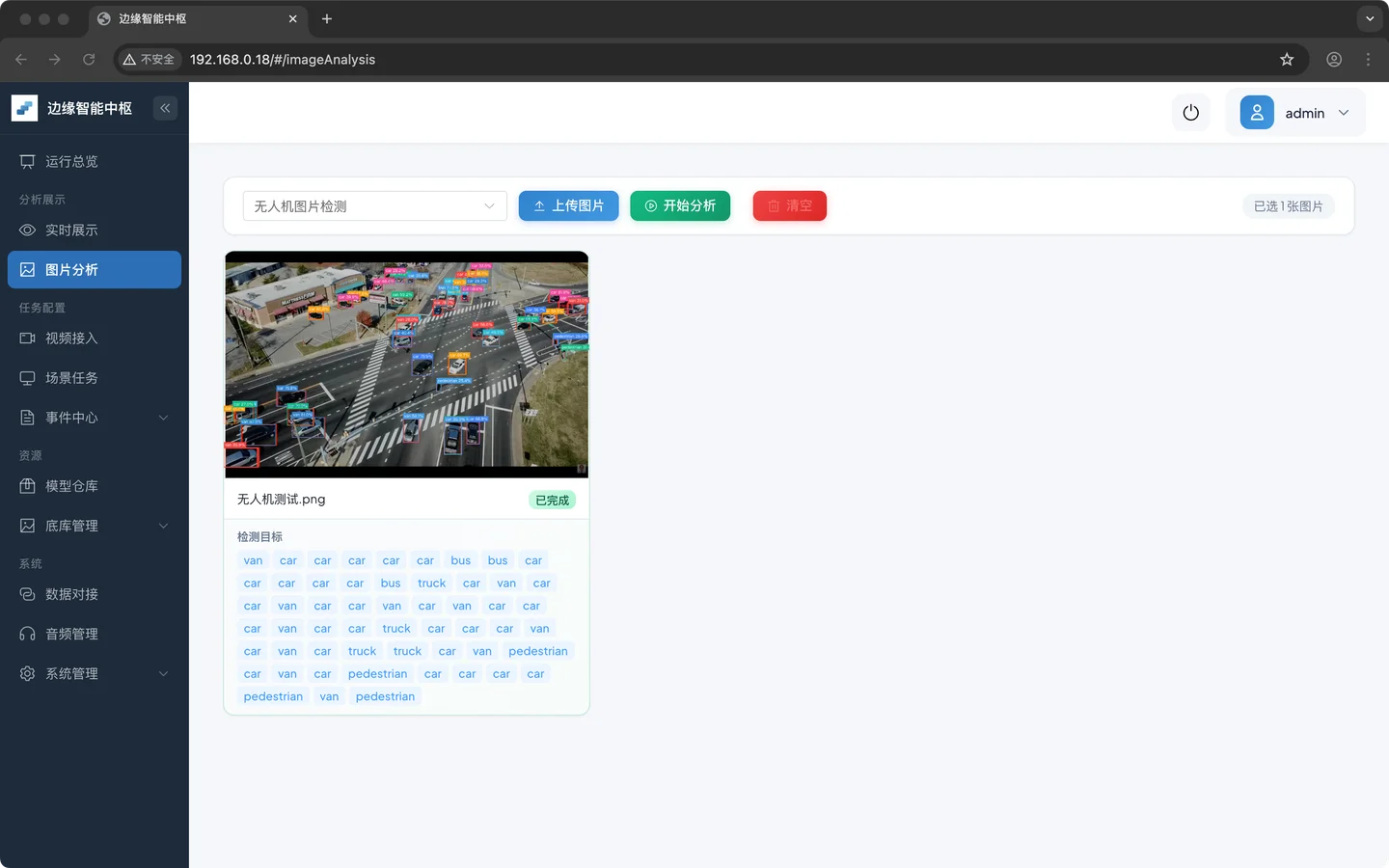
5.3 结果分析
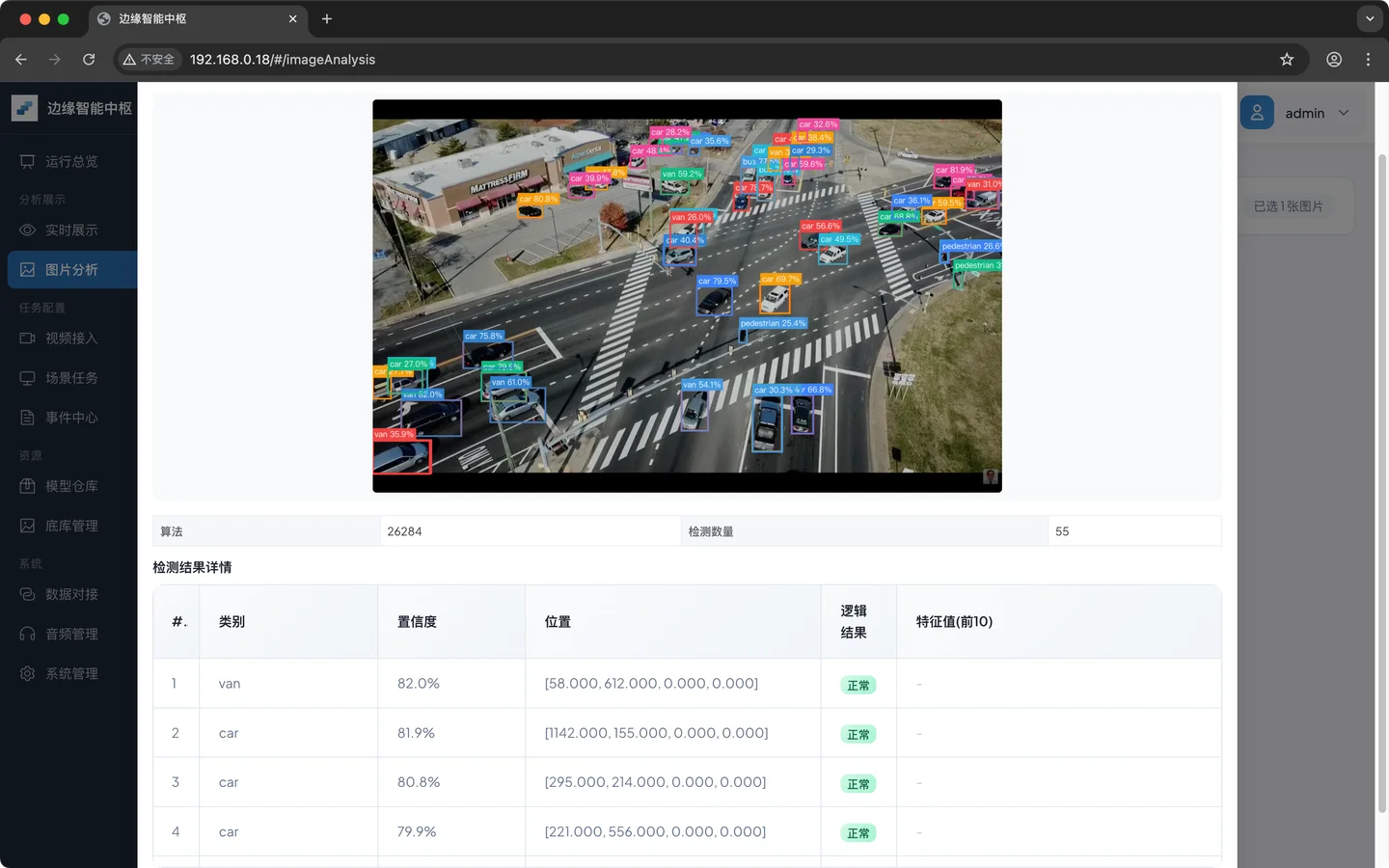
结果分析:
- 图片中的行人、车辆等目标能被检测出来
- 检测框位置基本合理
- 类别名称显示正常,不是数字或空白
如果图片验证都不通过,不要急着进入 场景任务 编排。 先回头检查:
- 模型文件是否上传正确
- 输入尺寸是否一致
- 类别标签是否配置完整
第六章:把第三方模型接入场景任务
现在开始把这个模型真正接入业务流程。
场景说明
创建一条新的 无人机目标检测 场景任务:
- 检测画面中的行人和车辆
- 生成事件
- 在实时画面上看到框和类别
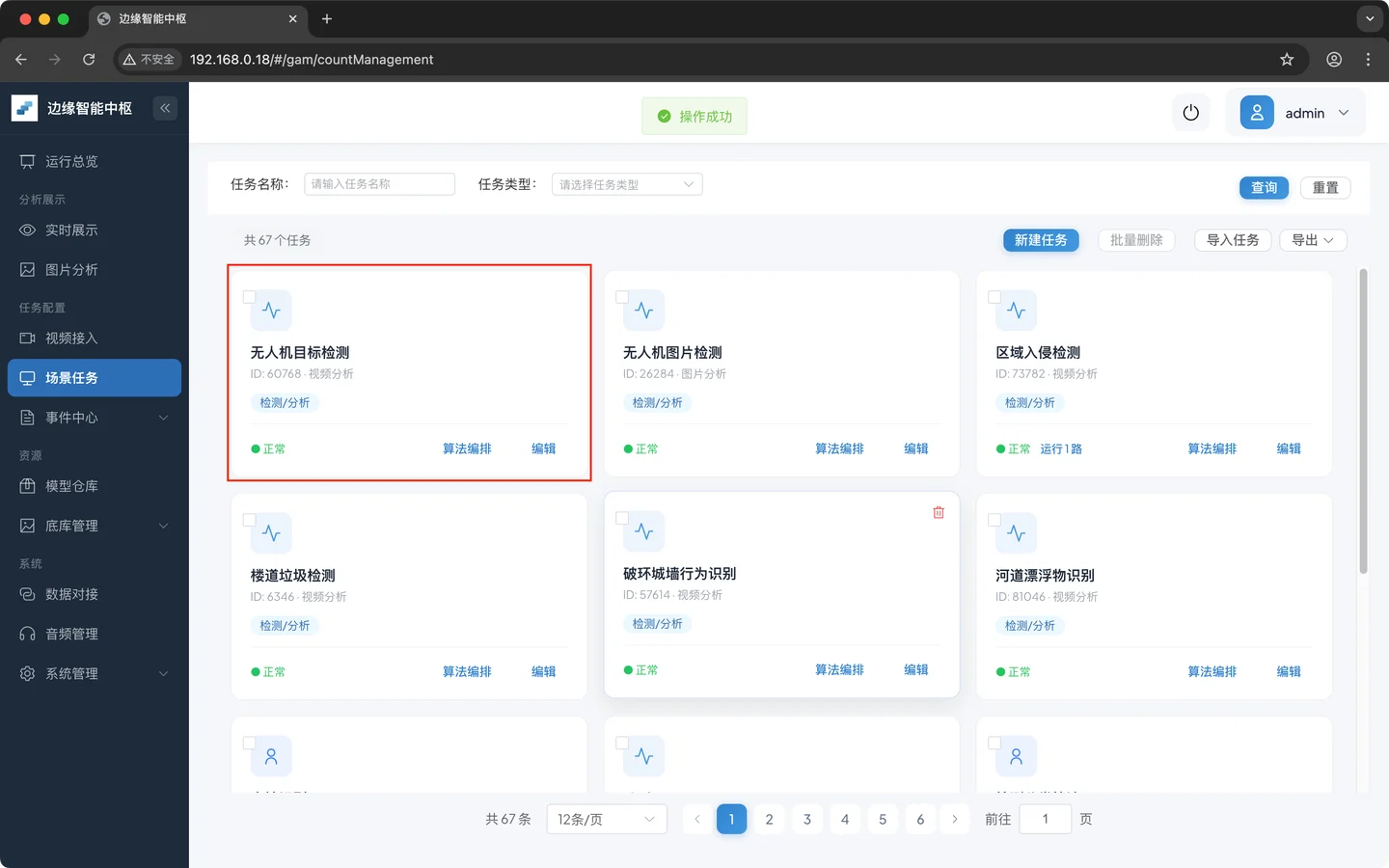
6.1 创建新算法
- 进入 **场景任务,新增任务 **
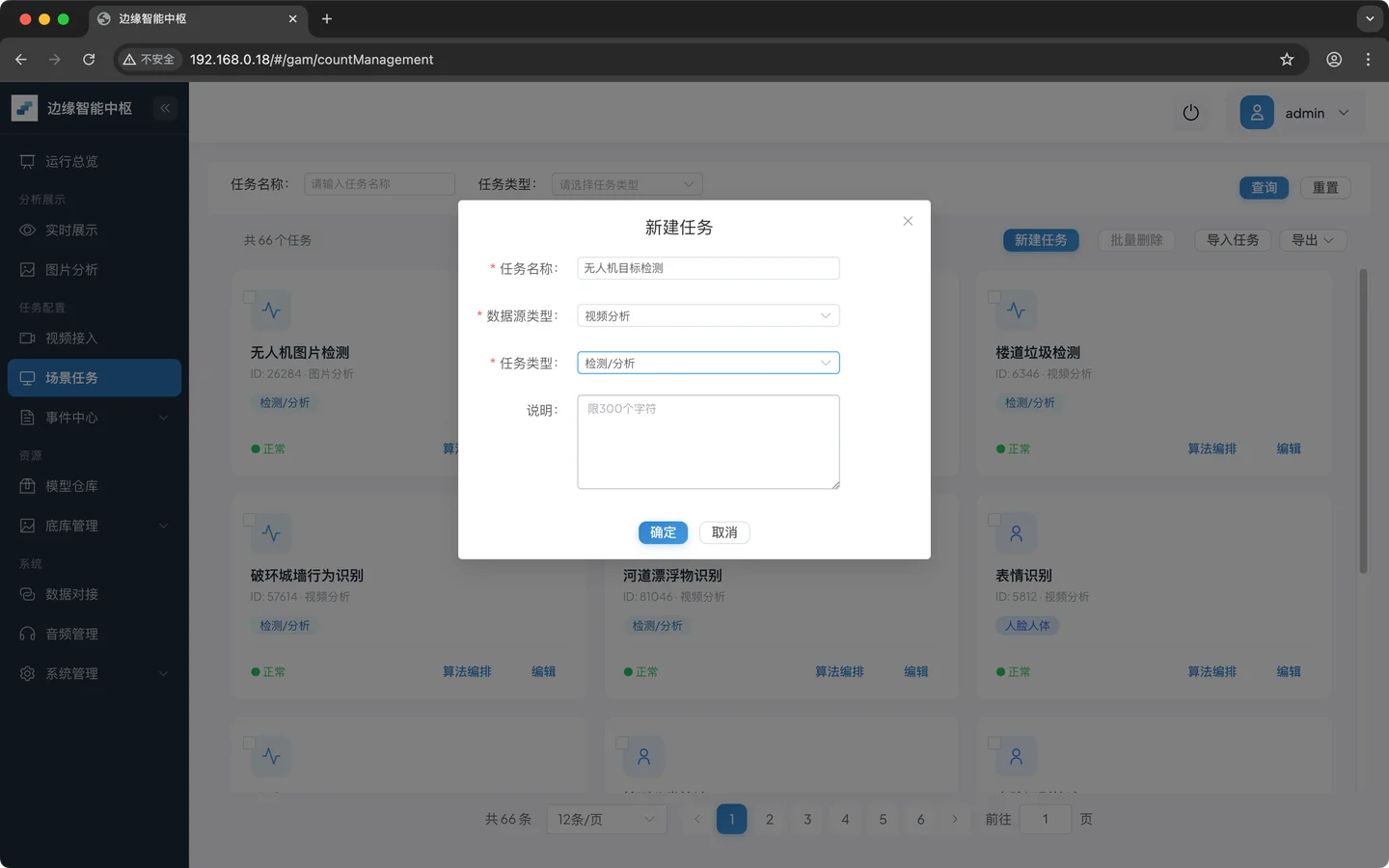
填写基础信息:
- 任务名称:无人机目标检测
- 数据源类型:视频分析
- 任务类型:检测/分析
6.2 搭建最小可用编排链路
按下面顺序添加节点:
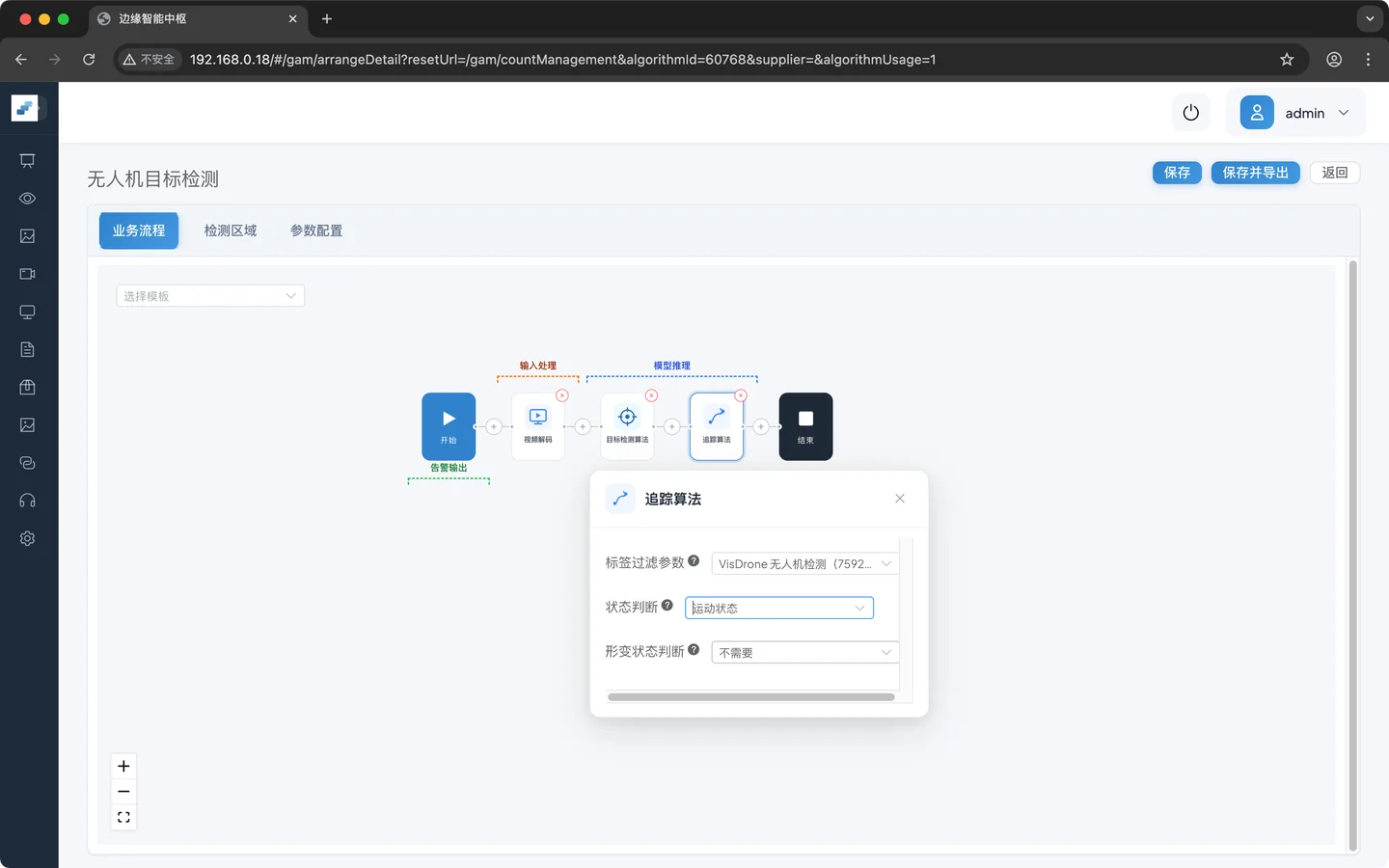
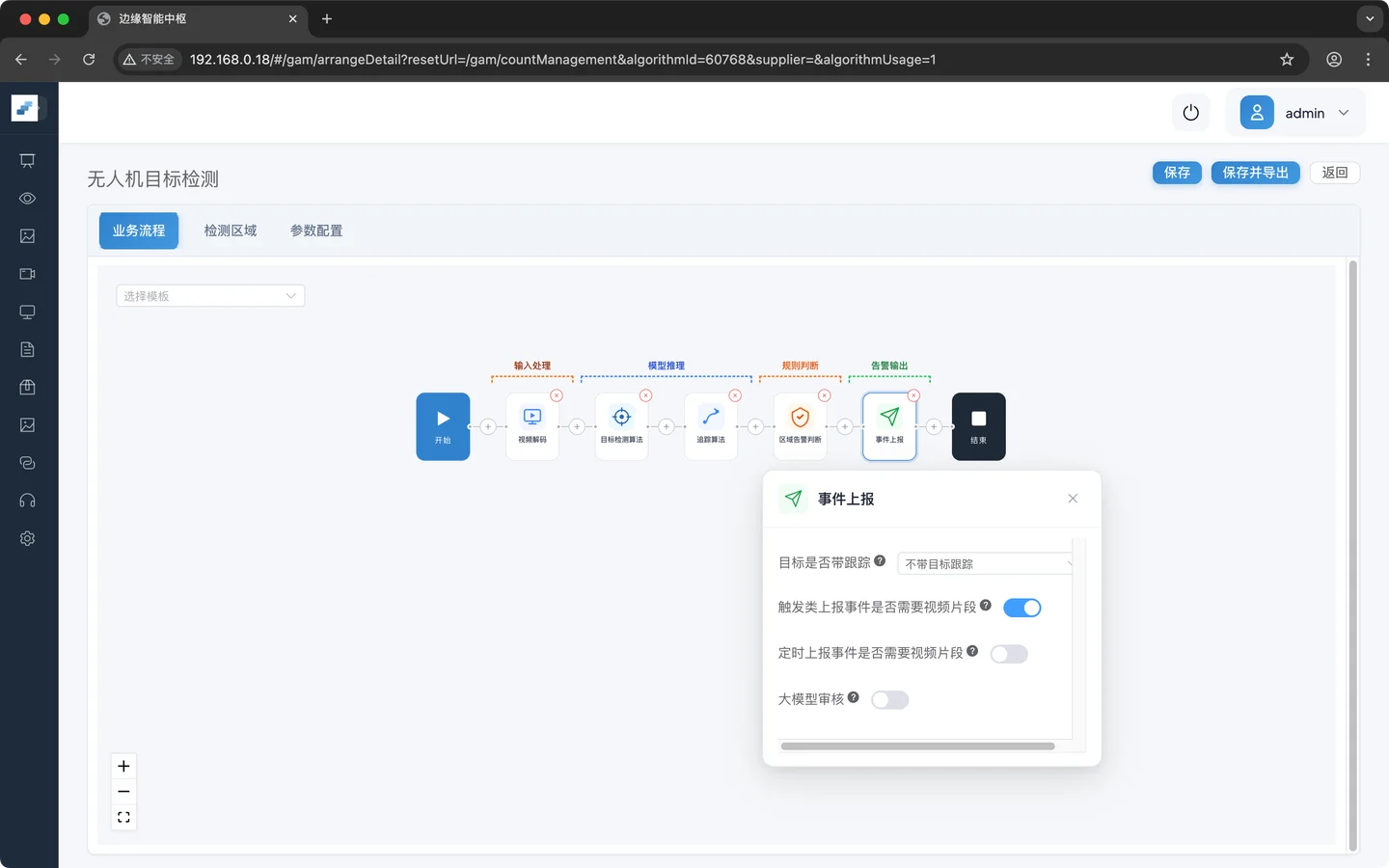
视频解码 → 目标检测(第三方模型) → 目标追踪 → 区域告警判断 → 事件上报- 点击 算法编排 进入编排页面
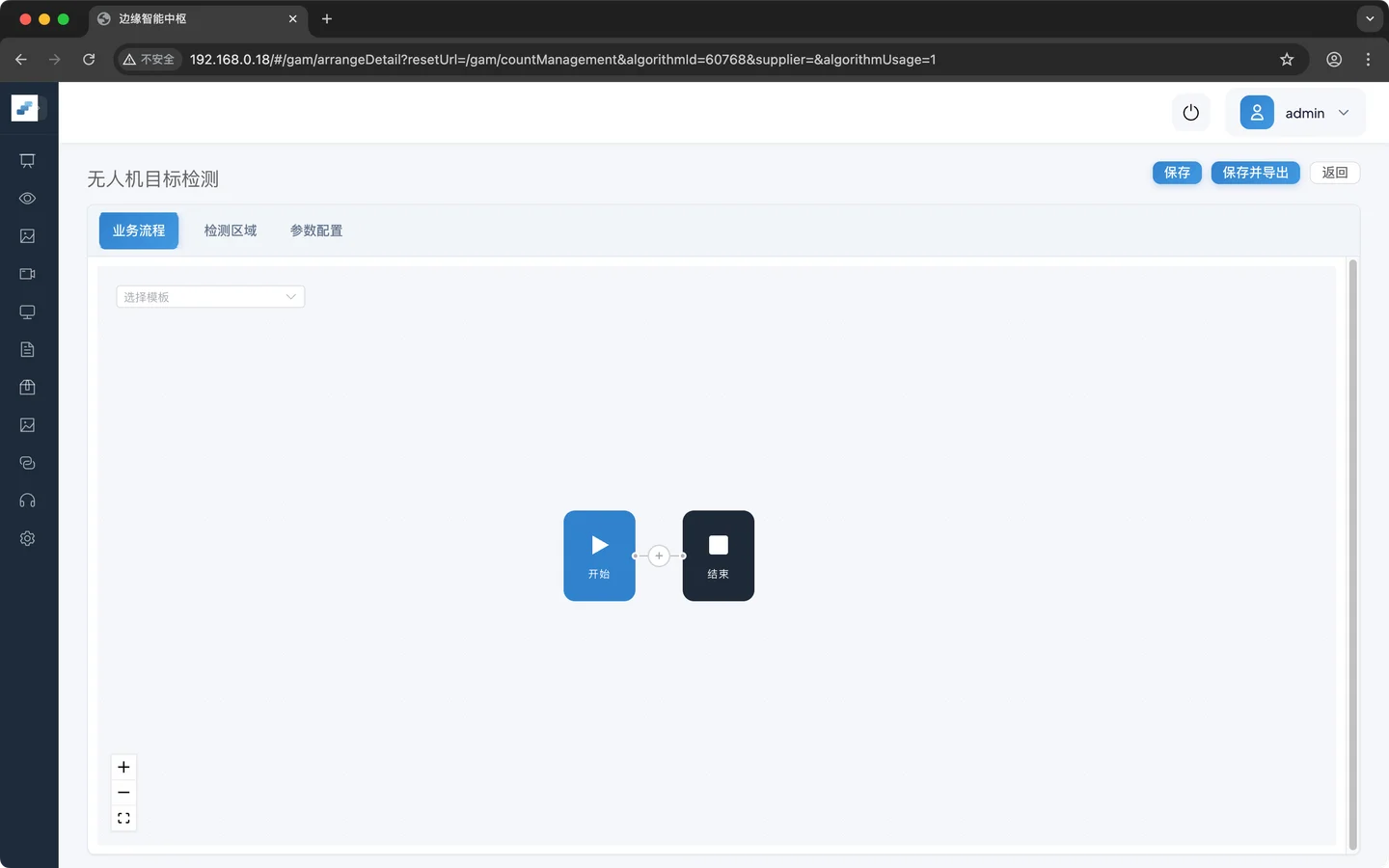
- 添加编排逻辑
第一步:添加 视频解码
第二步:添加** 目标检测算法**
第三步:添加目标追踪
第四步:添加区域告警判断

第五步:添加事件上报
- 配置参数
- 点击 保存 保存编排链路
第七章:端到端验证
7.1 创建视频接入
- 准备一段无人机视角测试视频
- 进入 **视频接入 **添加视频通道
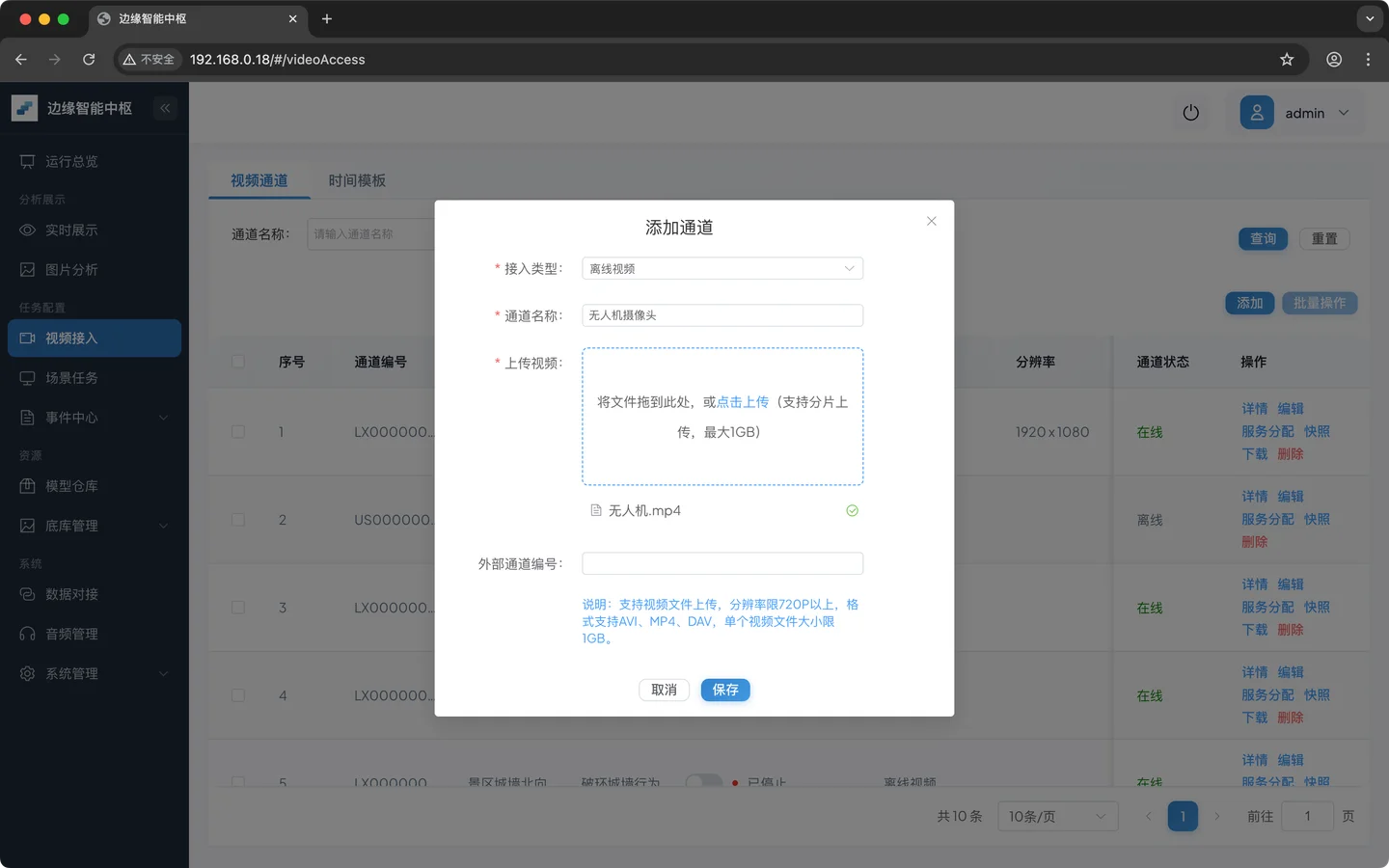
参数填写:
接入类型:离线视频
通道名称:无人机摄像头
上传视频:无人机.mp4
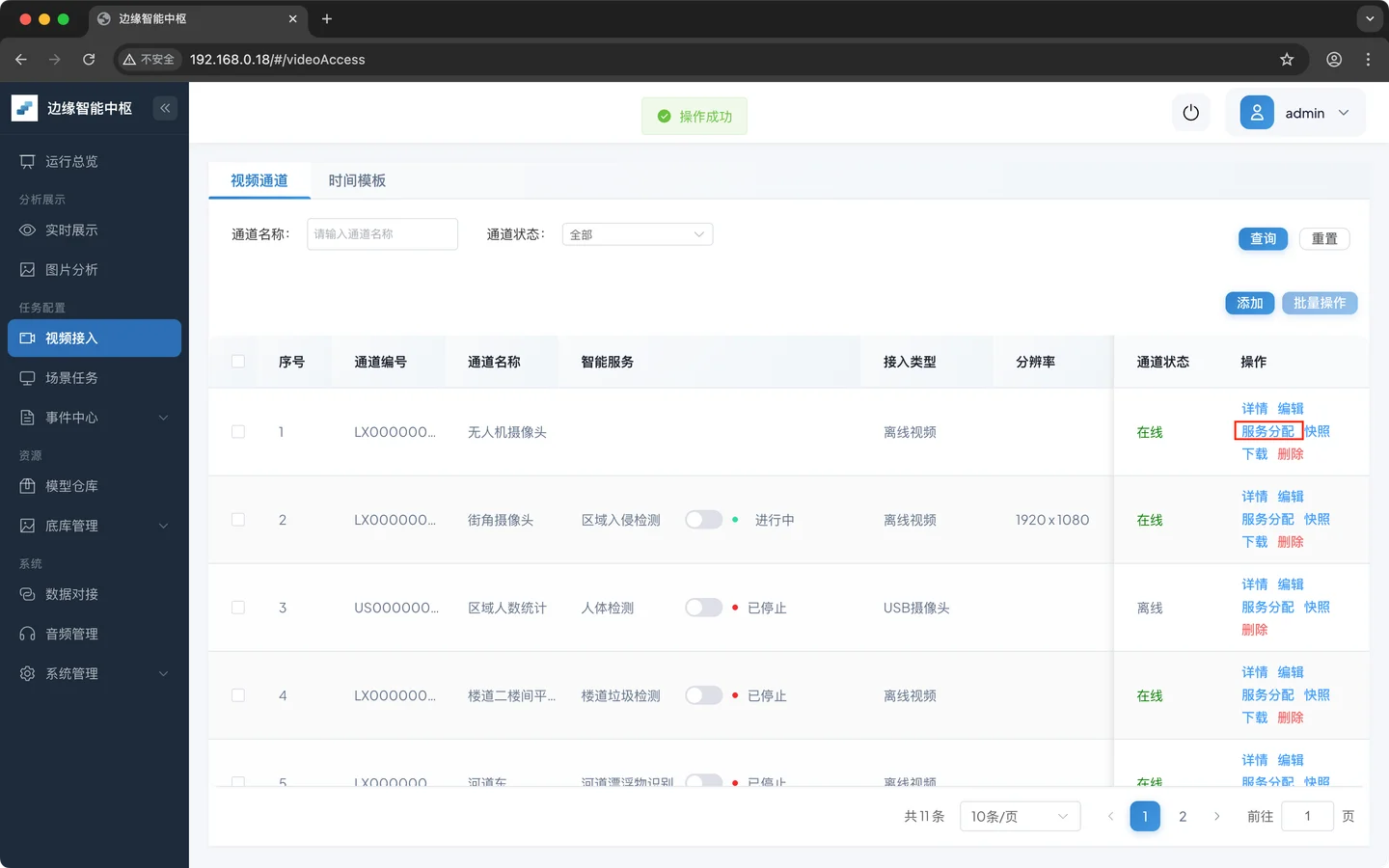
- 配置** 服务分配**
点击** 服务分配 **进入配置页面
任务场景选择 无人机目标检测
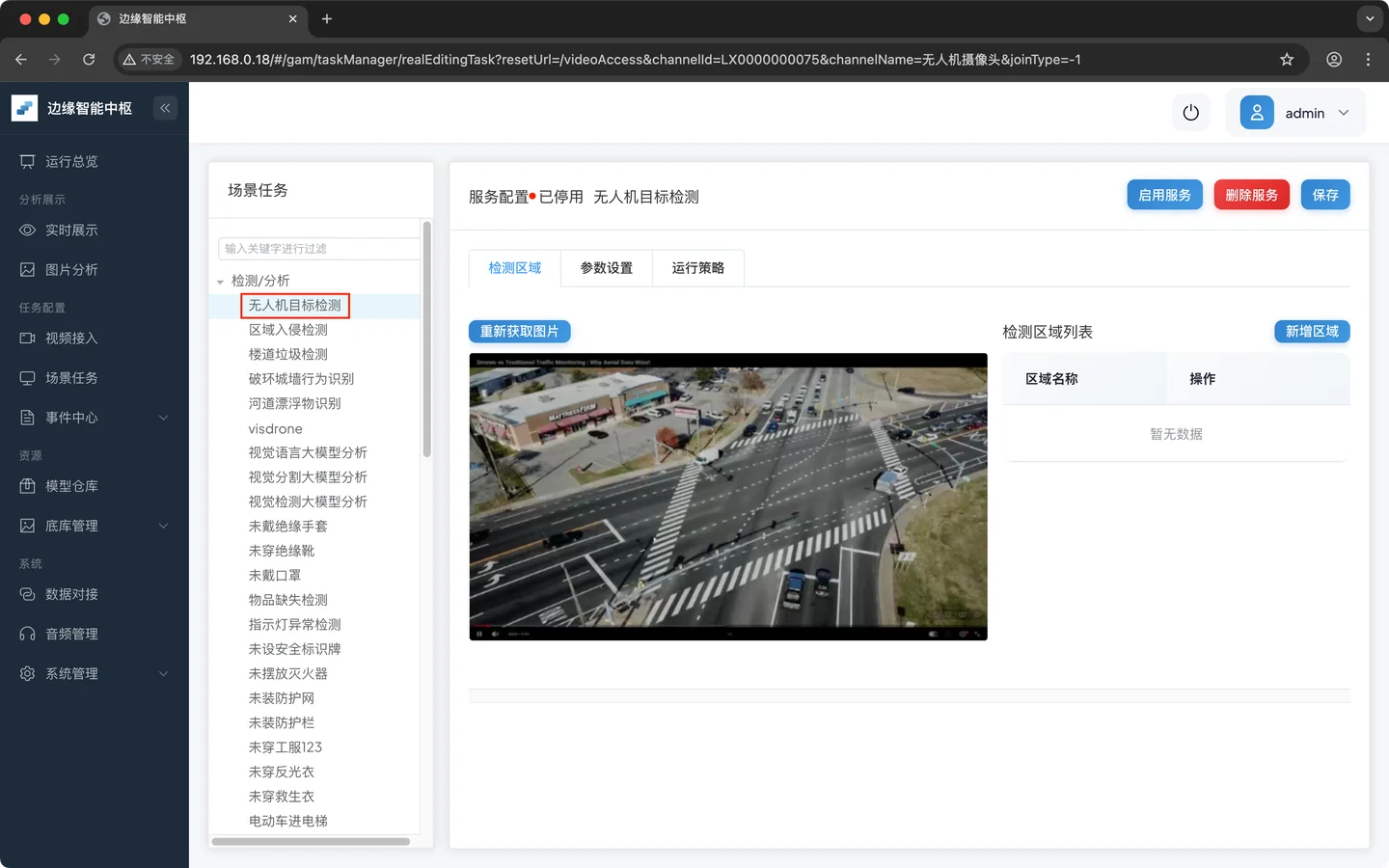
新增检测区域
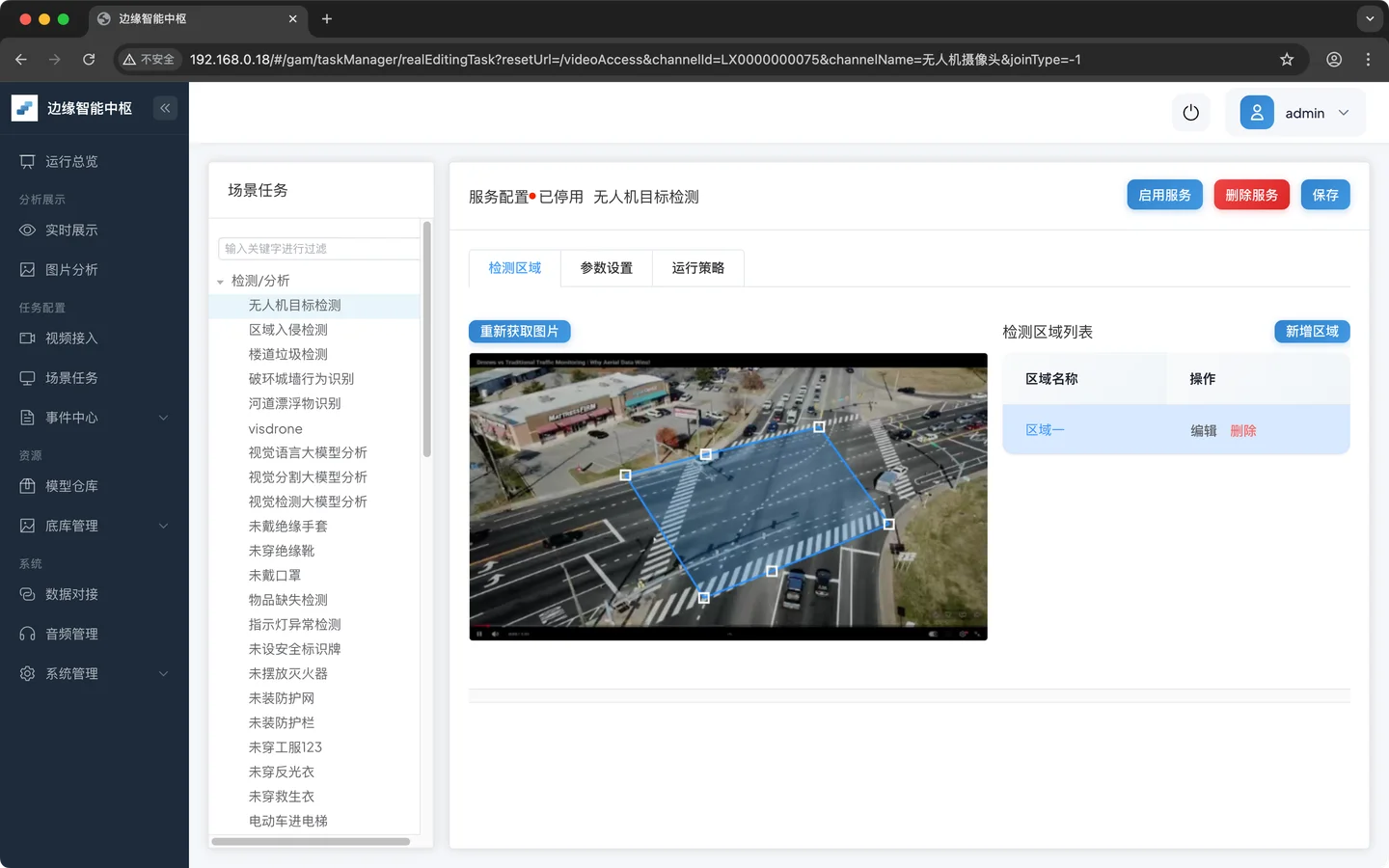
配置 运行策略 播放次数为0
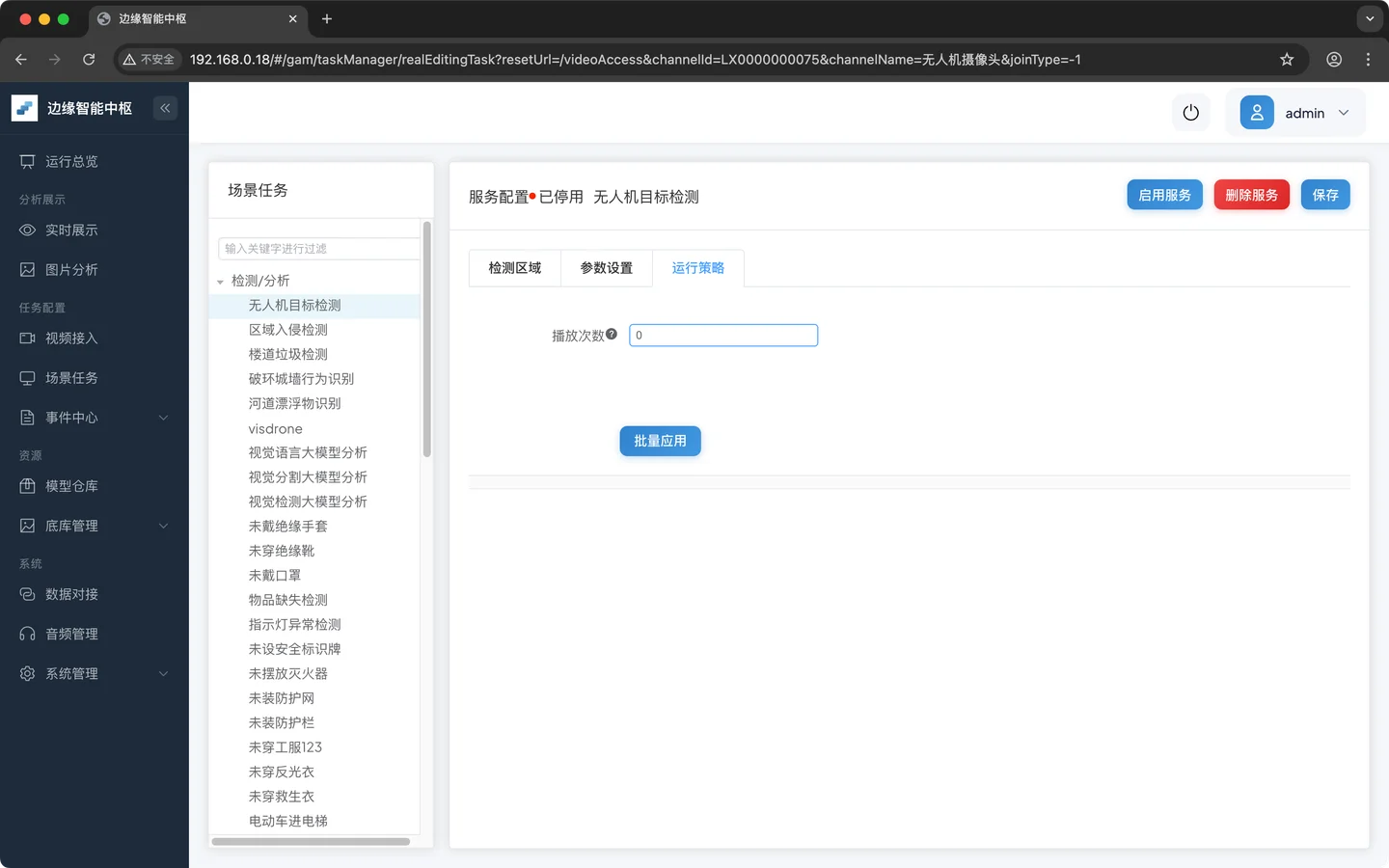
点击 **保存 **保存视频接入配置
7.2 观察实时展示
进入 实时展示,视频源 选择 无人机摄像头

算法叠加设置:无人机目标检测
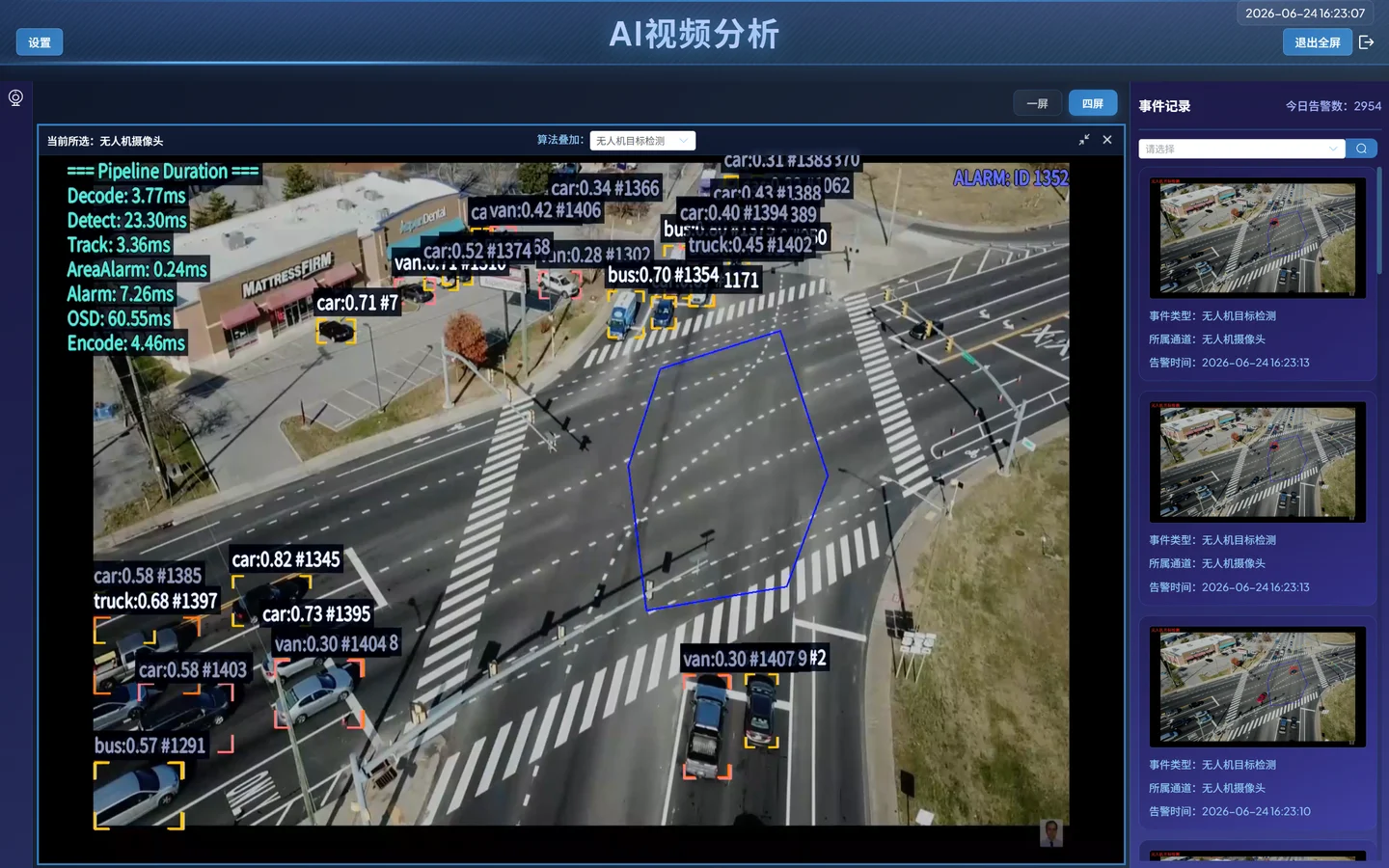
告警弹窗

检查:
- 画面中是否有检测框
- 类别是否显示正确
- 不同目标是否能持续跟踪
7.3 检查告警记录
进入 事件中心 -> 检测/分析 查看告警事件记录
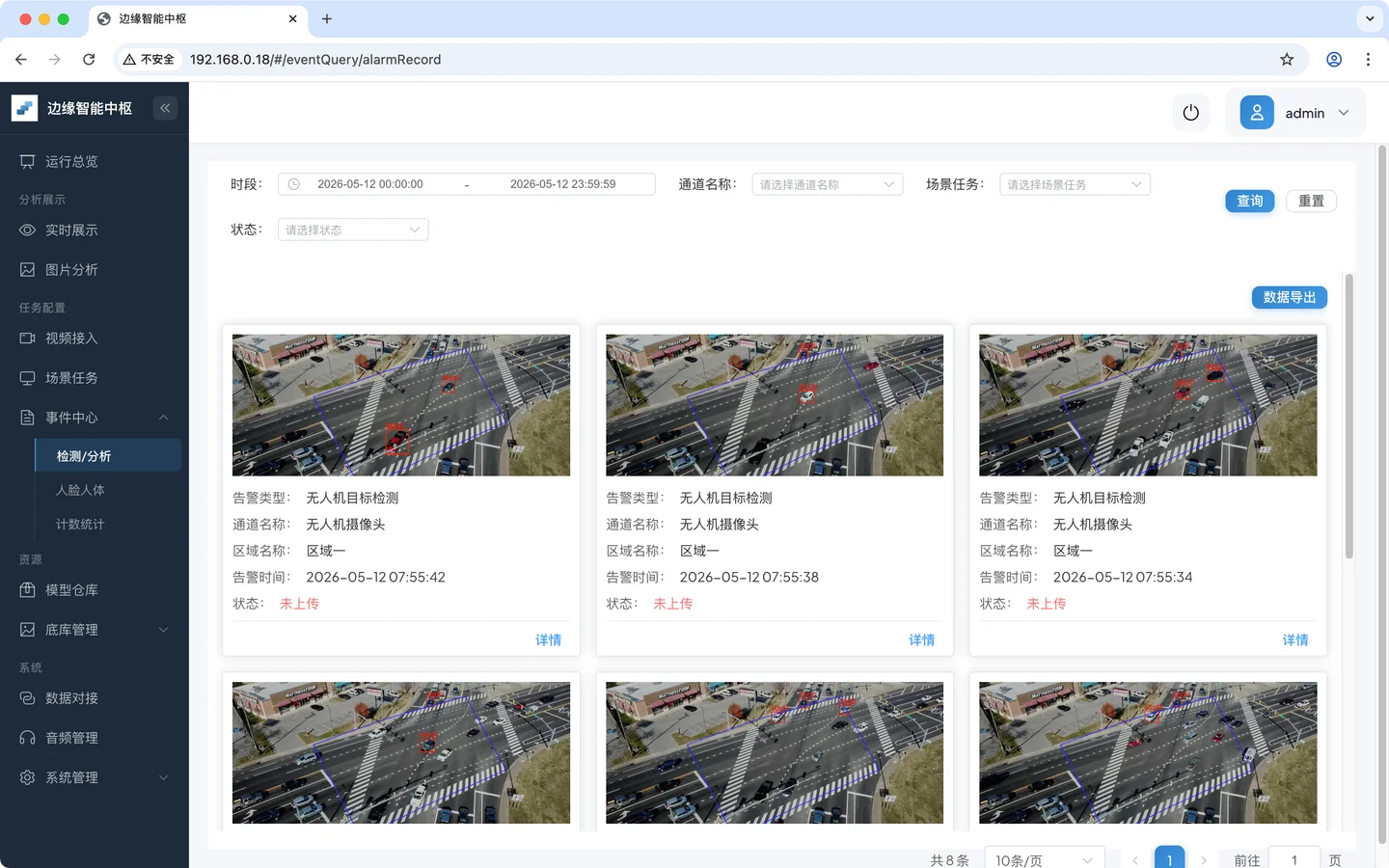
结果分析:告警事件正常记录,说明该编排链路正常运行
7.4 成功标准
如果以下三项同时成立,就说明这次第三方模型移植已经跑通:
- 图片测试能正常出结果
- 场景任务 能启动
- 实时展示和告警记录都能看到效果
附录
A. 常见问题排障
| 问题 | 可能原因 | 解决方法 |
|---|---|---|
| 模型上传后检测无结果 | 输入尺寸配置错误 | 检查模型元数据与转换参数是否一致 |
| 类别显示成数字 | 未配置类别标签 | 在模型仓库补全标签映射 |
| 场景任务 能启动但无框 | 缺少 OSD 叠加节点 | 在末端添加 OSD 叠加 |
| 图片测试正常但视频效果差 | 测试视频分布和训练场景差异大 | 先用更接近模型场景的视频验证 |
| 服务启动失败 | 节点未正确连线或模型类型不匹配 | 检查编排结构和模型类型 |
下一步
学完前五卷后,您已经具备一条完整能力链:
设备上手
↓
配置内置场景
↓
定义大模型规则
↓
编排业务流程
↓
移植第三方模型这意味着您已经可以:
- 用内置能力快速搭场景
- 用 VLM / DINO 补足长尾需求
- 用编排把能力组织成业务流程
- 把自己的模型真正接入系统